Содержание



Синхронная машина может работать генератором или двигателем. Синхронная машина может работать в качестве двигателя, если подвести к обмотке ее статора трехфазный ток из сети. В этом случае в результате взаимодействия магнитных полей статора и ротора поле статора увлекает за собой ротор. При этом ротор вращается в ту же сторону и с такой же скоростью, как и поле статора.

Наибольшее распространение получил генераторный режим работы синхронных машин, и почти вся электроэнергия вырабатывается синхронными генераторами. Синхронные двигатели применяются при мощности более 600 кВт и до 1 кВт как микродвигатели. Синхронные генераторы на напряжение до 1000 В применяются в агрегатах для автономных систем электроснабжения.
Агрегаты с этими генераторами могут быть стационарными и передвижными. Большинство агрегатов применяются с дизельными двигателями, но приводом их могут быть газовые турбины, электродвигатели и бензиновые двигатели.
Синхронный двигатель отличается от синхронного генератора лишь пусковой успокоительной обмоткой, которая должна обеспечивать хорошие пусковые свойства двигателя.
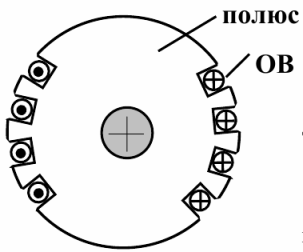
Схема шестиполюсного синхронного генератора. Показаны сечения обмоток одной фазы (три обмотки, соединенные последовательно). В показанные на рисунке свободные пазы укладываются обмотки двух других фаз. Фазы соединяются в звезду или треугольник.
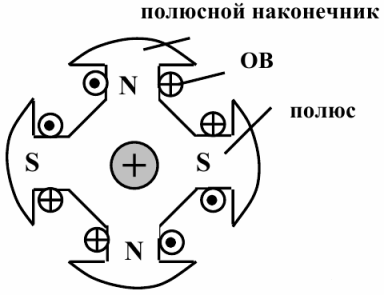
Режим генератора: двигатель (турбина) вращает ротор, на обмотку которого подается постоянное напряжение ? возникает ток, который создает постоянное магнитное поле. Магнитное поле вращается вместе с ротором, пересекает статорные обмотки и наводит в них одинаковые по модулю и частоте ЭДС, но сдвинутые на 1200 (симметричная трехфазная система).
Режим двигателя: обмотку статора подключают к трёхфазной сети, а обмотку ротора к источнику постоянного тока. В результате взаимодействия вращающегося магнитного поля машины с постоянным током обмотки возбуждения, возникает вращающий момент Мвр, который приводит ротор во вращение со скоростью магнитного поля.
Механическая характеристика синхронного двигателя – зависимость n(M)– представляет собой горизонтальный отрезок прямой.
 Применение синхронных двигателей
Применение синхронных двигателей
Синхронные двигатели имеют по сравнению с асинхронными большое преимущество, заключающееся в том, что благодаря возбуждению постоянным током они могут работать с cosфи = 1 и не потребляют при этом реактивной мощности из сети, а при работе, с перевозбуждением даже отдают реактивную мощность в сеть. В результате улучшается коэффициент мощности сети и уменьшаются падение напряжения и потери в ней, а также повышается коэффициент мощности генераторов, работающих на электростанциях.
Максимальный момент синхронного двигателя пропорционален U, а у асинхронного двигателя U 2 .
Поэтому при понижении напряжения синхронный двигатель сохраняет большую нагрузочную способность. Кроме того, использование возможности увеличения тока возбуждения синхронных двигателей позволяет увеличивать их надежность работы при аварийных понижениях напряжения в сети и улучшать в этих случаях условия работы энергосистемы в целом. Вследствие большей величины воздушного зазора добавочные потери в стали и в клетке ротора синхронных двигателей меньше, чем у асинхронных, благодаря чему к. п. д. синхронных двигателей обычно выше.
С другой стороны, конструкция синхронных двигателей сложнее, чем короткозамкнутых асинхронных двигателей, и, кроме того, синхронные двигатели должны иметь возбудитель или иное устройство для питания обмотки возбуждения постоянным током. Вследствие этого синхронные двигатели в большинстве случаев дороже асинхронных двигателей с короткозамкнутым ротором.
При эксплуатации синхронных двигателей возникли существенные трудности с их пуском. В настоящее время эти трудности преодолены.

Пуск и регулирование скорости вращения синхронных двигателей также сложнее. Тем не менее, преимущество синхронных двигателей настолько велико, что при больших мощностях их целесообразно применять всюду, где не требуется частых пусков и остановок и регулирования скорости вращения (двигатель-генераторы, мощные насосы, вентиляторы, компрессоры, мельницы, дробилки и пр.).
Синхронные компенсаторы предназначаются для компенсации коэффициента мощности сети и поддержания нормального уровня напряжения сети в районах сосредоточения потребительских нагрузок. Нормальным являемся перевозбужденный режим работы синхронного компенсатора, когда он отдает в сеть реактивную мощность.
В связи с этим компенсаторы, как и служащие для этих же целей батареи конденсаторов, устанавливаемые на потребительских подстанциях, называют также генераторами реактивной мощности. Однако в периоды спада потребительских нагрузок (например, ночью) нередко возникает необходимость работы синхронных компенсаторов также в недовозбужденном режиме, когда они потребляют из сети индуктивный ток и реактивную мощность, так как в этих случаях напряжение сети стремится возрасти и для поддержания его на нормальном уровне необходимо загрузить сеть индуктивными токами, вызывающими в ней дополнительные падения напряжения.
Для этого каждый синхронный компенсатор снабжается автоматическим регулятором возбуждения или напряжения, который регулирует величину его тока возбуждения так, что напряжение на зажимах компенсатора остается постоянным.
Главное отличие между синхронным двигателем с постоянными магнитами (СДПМ) и асинхронным электродвигателем заключается в роторе. Проведенные исследования 1 показывают, что СДПМ имеет КПД примерно на 2% больше, чем высоко эффективный (IE3) асинхронный электродвигатель, при условии, что статор имеет одинаковую конструкцию, а для управления используется один и тот же частотный преобразователь. При этом синхронные электродвигатели с постоянными магнитами по сравнению с другими электродвигателями обладают лучшими показателями: мощность/объем, момент/инерция и др.
Конструкции и типы синхронного электродвигателя с постоянными магнитами
Синхронный электродвигатель с постоянными магнитами, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.

Обычно ротор располагается внутри статора электродвигателя, также существуют конструкции с внешним ротором — электродвигатели обращенного типа.

Ротор состоит из постоянных магнитов. В качестве постоянных магнитов используются материалы с высокой коэрцитивной силой.
Электродвигатель с неявно выраженными полюсами имеет равную индуктивность по продольной и поперечной осям Ld = Lq, тогда как у электродвигателя с явно выраженными полюсами поперечная индуктивность не равна продольной Lq ≠ Ld.

-
Также по конструкции ротора СДПМ делятся на:
- синхронный двигатель c поверхностной установкой постоянных магнитов
(англ. SPMSM — surface permanent magnet synchronous motor); - синхронный двигатель со встроенными (инкорпорированными) магнитами
(англ. IPMSM — interior permanent magnet synchronous motor).


Статор состоит из корпуса и сердечника с обмоткой. Наиболее распространены конструкции с двух- и трехфазной обмоткой.
-
В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
- с распределенной обмоткой;
- с сосредоточенной обмоткой.


Распределенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 2, 3. k.
Сосредоточенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 1. При этом пазы расположены равномерно по окружности статора. Две катушки, образующие обмотку, можно соединить как последовательно, так и параллельно. Основной недостаток таких обмоток — невозможность влияния на форму кривой ЭДС [2].


-
Форма обратной ЭДС электродвигателя может быть:
- трапецеидальная;
- синусоидальная.
Форма кривой ЭДС в проводнике определяется кривой распределения магнитной индукции в зазоре по окружности статора.
Известно, что магнитная индукция в зазоре под явно выраженным полюсом ротора имеет трапециидальную форму. Такую же форму имеет и наводимая в проводнике ЭДС. Если необходимо создать синусоидальную ЭДС, то полюсным наконечникам придают такую форму, при которой кривая распределения индукции была бы близка к синусоидальной. Этому способствуют скосы полюсных наконечников ротора [2].
Принцип работы синхронного двигателя
Принцип действия синхронного электродвигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора. Концепция вращающегося магнитного поля статора синхронного электродвигателя такая же, как и у трехфазного асинхронного электродвигателя.
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора.


Магнитное поле ротора, взаимодействуя с синхронным переменным током обмоток статора, согласно закону Ампера, создает крутящий момент, заставляя ротор вращаться (подробнее).
Постоянные магниты, расположенные на роторе СДПМ, создают постоянное магнитное поле. При синхронной скорости вращения ротора с полем статора, полюса ротора сцепляются с вращающимся магнитным полем статора. В связи с этим СДПМ не может сам запуститься при подключении его напрямую к сети трехфазного тока (частота тока в сети 50Гц).
Управление синхронным двигателем с постоянными магнитами
Для работы синхронного двигателя с постоянными магнитами обязательно требуется система управления, например, частотный преобразователь или сервопривод. При этом существует большое количество способов управления реализуемых системами контроля. Выбор оптимального способа управления, главным образом, зависит от задачи, которая ставится перед электроприводом. Основные методы управления синхронным электродвигателем с постоянными магнитами приведены в таблице ниже.
| Управление | Преимущества | Недостатки | |||
|---|---|---|---|---|---|
| Синусоидальное | Скалярное | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| Векторное | Полеориентированное управление | С датчиком положения | Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования | Требуется датчик положения ротора и мощный микроконтроллер системы управления | |
| Без датчика положения | Не требуется датчик положения ротора. Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования, но меньше, чем с датчиком положения | Бездатчиковое полеориентированное управление во всем диапазоне скоростей возможно только для СДПМ с ротором с явно выраженными полюсами, требуется мощная система управления | |||
| Прямое управление моментом | Простая схема управления, хорошие динамические характеристики, большой диапазон регулирования, не требуется датчик положения ротора | Высокие пульсации момента и тока | |||
| Трапециидальное | Без обратной связи | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| С обратной связью | С датчиком положения (датчиками Холла) | Простая схема управления | Требуются датчики Холла. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | ||
| Без датчика | Требуется более мощная система управления | Не подходит для работы на низких оборотах. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | |||
Для решения несложных задач обычно используется трапециидальное управление по датчикам Холла (например — компьютерные вентиляторы). Для решения задач, которые требуют максимальных характеристик от электропривода, обычно выбирается полеориентированное управление.
Трапециидальное управление
Одним из простейших методов управления синхронным двигателем с постоянными магнитами является — трапецеидальное управление. Трапециидальное управление применяется для управления СДПМ с трапециидальной обратной ЭДС. При этом этот метод позволяет также управлять СДПМ с синусоидальной обратной ЭДС, но тогда средний момент электропривода будет ниже на 5%, а пульсации момента составят 14% от максимального значения. Существует трапециидальное управление без обратной связи и с обратной связью по положению ротора.
Управление без обратной связи не оптимально и может привести к выходу СДПМ из синхронизма, т.е. к потери управляемости.
-
Управление с обратной связью можно разделить на:
- трапециидальное управление по датчику положения (обычно — по датчикам Холла);
- трапециидальное управление без датчика (бездатчиковое трапециидальное управление).
В качестве датчика положения ротора при трапециидальном управлении трехфазного СДПМ обычно используются три датчика Холла встроенные в электродвигатель, которые позволяют определить угол с точностью ±30 градусов. При таком управление вектор тока статора принимает только шесть положений на один электрический период, в результате чего на выходе имеются пульсации момента.
Полеориентированное управление
Полеориентированное управление позволяет плавно, точно и независимо управлять скоростью и моментом бесщеточного электродвигателя. Для работы алгоритма полеориентированного управления требуется знать положение ротора бесщеточного электродвигателя.
-
Существует два способа определения положения ротора:
- по датчику положения;
- без датчика — посредством вычисления угла системой управления в реальном времени на основе имеющейся информации.
Полеориентированное управление СДПМ по датчику положения
-
В качестве датчика угла используются следующие типы датчиков:
- индуктивные: синусно-косинусный вращающийся трансформатор (СКВТ), редуктосин, индуктосин и др.;
- оптические;
- магнитные: магниторезистивные датчики.

Полеориентированное управление СДПМ без датчика положения
Благодаря бурному развитию микропроцессоров с 1970-х годов начали разрабатываться бездатчиковые векторные методы управления бесщеточными электродвигателями переменного тока. Первые бездатчиковые методы определения угла были основаны на свойстве электродвигателя генерировать обратную ЭДС во время вращения. Обратная ЭДС двигателя содержит в себе информацию о положении ротора, поэтому вычислив величину обратной ЭДС в стационарной системе координат можно рассчитать положение ротора. Но, когда ротор не подвижен, обратная ЭДС отсутствует, а на низких оборотах обратная ЭДС имеет маленькую амплитуду, которую сложно отличить от шума, поэтому данный метод не подходит для определения положения ротора двигателя на низких оборотах.
-
Существует два распространенных варианта запуска СДПМ:
- запуск скалярным методом — запуск по заранее определенной характеристики зависимости напряжения от частоты. Но скалярное управление сильно ограничивает возможности системы управления и параметры электропривода в целом;
- метод наложения высокочастотного сигнала – работает только с СДПМ у которого ротор имеет явно выраженные полюса.

На текущий момент бездатчиковое полеориентированное управление СДПМ во всем диапазоне скоростей возможно только для двигателей с ротором с явно выраженными полюсами.
Явнополюсная машина. Обмотка возбуждения создает магнитный поток возбуждения синхронной машины (рис. 32-1), который сцепляется с обмоткой якоря и индуктирует в ней э. д. с. Расчет магнитной цепи явнополюсной синхронной машины производится подобно расчету магнитной цепи машины постоянного тока. Подробности этого расчета рассматриваются в пособиях по проектированию, электрических машин. Магнитная характеристика Ф = / (if) синхронной машины имеет такой же вид, как и у других электрических машин. Ниже рассмотрим особенности магнитного поля, создаваемого обмоткой возбуждения, и индуктивности этой обмотки. Величины, относящиеся к обмотке возбуждения синхронной машины, будем обозначать индексом /, как это принято в большинстве литературных источников.
На рис. 32-2, а изображена картина магнитного поля обмотки возбуждения в воздушном зазоре явнополюсной синхронной машины на протяжении одного полюсного деления. На рис. 32-2, б кривая / представляет собой распределение магнитной индукции поля возбуждения Bf на поверхности якоря (статора). Как уже указывалось, при проектировании синхронных машин принимаются меры к’тому, чтобы эта кривая по возможности приближалась к синусоиде. Однако вполне синусоидального распределения Bf достичь невозможно и поле возбуждения (кривая 1 на рис. 32-2Г б) можно разложить на основную (кривая 2) и высшие гармоники, которые индуктируют в обмотке якоря соответственно основную и высшие гармоники э. д. с. Высшие гармоники э. д. с. относительно малы, так как малы соответствующие гармоники поля и, кроме того, выбором шага и числа пазов на полюс и фазу обмотки якоря достигается уменьшение высших гармоник э. д. с. Поэтому в теории синхронных машин учитывается только основная гармоника э. д. с. якоря и соответственно потоком взаимной индукции между индуктором и якорем считается основная гармоника поля возбуждения (кривая 2 на рис. 32-2, б).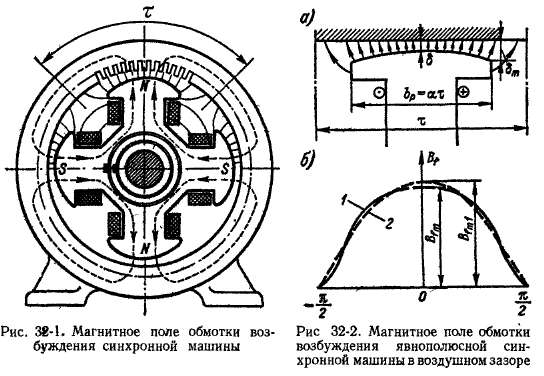
Магнитное поле и параметры обмотки якоря
При нагрузке обмотки якоря синхронной машины током она создает собственное магнитное поле, которое называется полем реакции якоря.
В нормальных машинах постоянного тока, с установкой щеток на геометрической нейтрали, поле реакции якоря является поперечным, т. е. действует поперек оси главных полюсов. Поэтому оно не индуктирует э. д. с. в обмотке якоря и оказывает относительно слабое влияние на величину потока в воздушном зазоре и на характеристики машины. В отличие от машин постоянного тока в синхронной машине влияние реакции якоря на величину магнитного потока весьма значительно. Это обусловлено прежде всего тем, что в синхронной машине в общем случае возникает также значительная продольная реакция якоря усиливающая или ослабляющая поток полюсов. Кроме того, поле поперечной реакции якоря синхронной машины также индуктирует значительную э. д. с. в обмотке якоря.
Поэтому реакция якоря синхронной машины оказывает весьма значительное влияние на характеристики и поведение синхронной машины как при установившихся, так и при переходных режимах рабрты.
Индуктор (ротор) явнополюсной машины имеет магнитную несимметрию, так как ввиду наличия большого междуполюсного пространства магнитное сопротивление потоку, действующему по направлению поперечной оси q, т. е. по оси междуполюсного пространства, значительно больше магнитного сопротивления потоку, действующему по продольной оси d. Поэтому одинаковая по величине н. с. якоря при ее действии по продольной оси создает больший магнитный поток, чем при действии по поперечной оси. Кроме того, как ротор явнополюсной, так и ротор неявнополюсной машины имеют также электрическую несимметрию, так как их обмотки возбуждения расположены только по продольной оси d, т. е. создают поток, действующий по оси d, и сами сцепляются только с потоком якоря, действующим по этой же оси. Электрическая несимметрия индукторов синхронных машин существенным образом проявляется при несимметричных и переходных режимах их работы.
Ввиду несимметричного устройства индуктора возникает, необходимость рассматривать действие реакции якоря по продольной и поперечной осям в отдельности. Метод такого рассмотрения впервые был Предложен французским электротехником А. Блон-делем в 1895 г. и называется методом или теорией двух реакций. Метод двух реакций основан на принципе наложения, при котором предполагается, что магнитные потоки, действующие по поперечной оси, не влияют на величину потоков, действующих по продольной оси, и наоборот. Ввиду наличия определенного насыщения участков магнитной цепи это предположение не вполне правильно. Однако учет влияния насыщения очень сложен, а определенные коррективы могут быть внесены дополнительно.
Поперечная реакция якоря
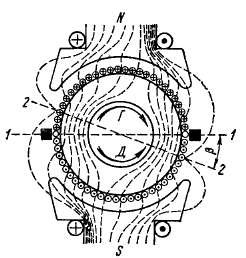
При установке щеток на геометрической нейтрали /—1 (рис. 5-1, б) поле якоря направлено поперек оси полюсов, и в этом случае оно называется полем поперечной ре.акции якоря.
Как следует из рис. 5-2, поперечная реакция якоря вызывает ослабление поля под одним краем полюса и его усиление под другим, вследствие чего ось результирующего поля поворачивается в генераторе по направлению вращения якоря, а в двигателе — в обратную сторону. Если условно, как это иногда делается, рассматривать линии магнитной индукции в качестве упругих нитей, то возникновение электромагнитного момента можно рассматривать как результат действия упругих сил этих нитей, стремящихся сократиться и повернуть якорь. Из рис. 5-2 видно, что при такой трактовке явлений направления действия моментов совпадают с реальными как в режиме генератора, так и в режиме двигателя.
Под воздействием поперечной реакции якоря нейтральная линия на поверхности якоря, на которой 5 = 0, поворачивается из положения геометрической нейтрали /—/ на некоторый угол р в положение 2—2 (рис. 5-2), которое называется линией физической нейтрали. В генераторе физическая нейтраль повернута в сторону вращения якоря, а в двигателе — в обратную сторону.
Из рис. 5-1, б следует, что при вращении якоря в проводниках, показанных в левой части рис. 5-1, б, поле поперечной реакции
Рис. 5-1. Магнитное поле индуктора (а) и якоря (б)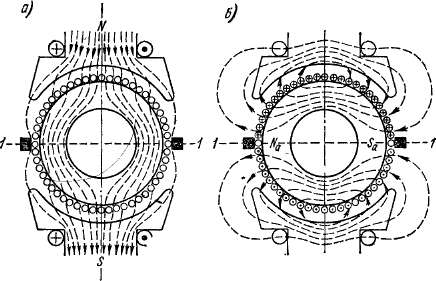
 5,2
5,2 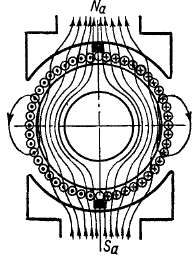 5,3
5,3
Из рис. 5-1, б следует, что при вращении якоря в проводниках, показанных в левой части рис. 5-1, б, поле поперечной реакции
Рис. 5-2. Результирующее магнитное поле при установке щеток на геометрической нейтрали
Рис. 5-3. Поле продольной реакции якоря
Продольная реакция якоря
Если щетки сдвинуты с геометрической нейтрали на 90° эл. (рис. 5-3), то поле якоря действует вдоль оси полюсов и называется полем продольной реакции якоря. Это поле в зависимости от направления тока в якоре оказывает на поле полюсов намагничивающее или размагничивающее действие, и в результате его взаимодействия с полем полюсов электромагнитный момент не возникает. Индуктируемая при вращении якоря э. д. с. на щетках будет в этом случае также равна нулю.






