Механизмы подъема грузаустанавливаются на всех грузоподъемных машинах. Их конструкция и методы расчета характерны не только для кранов общего, но и для машин специального назначения. В данной теме приведены кинематические и энергосиловые расчеты приводов.
Механизмы подъема груза – это механизм, предназначенный для вертикального перемещения груза и состоящий из полиспастной системы и лебедки.
Грузовые лебедкиможно использовать не только в механизмах подъема груза, но и в механизмах изменения вылета стрелы, а также в качестве тяговых лебедках на кранах и других подъемно-транспортных машинах.
Грузовая лебедка – это машина для подъема грузов канатом, навиваемым на барабан.
В подъемных механизмах применяют в основном силовые полиспасты для уменьшения усилия в канате и снижения передаточного числа редуктора.
Полиспаст – это система подвижных и неподвижных блоков, огибаемых канатом или цепью, которая предназначена для выигрыша в силе – силовые полиспасты или скорости – скоростные полиспасты.
Классификация механизмов подъема грузов.
1. В зависимости от конструктивной схемы их можно разделить на два основных типа:
— с жесткой кинематической схемой — канатным или цепным приводом, ходовым винтом или зубчатой рейкой;
— с фрикционным приводом — канатоведущнм шкивом (применяется только в подъемниках).
2. По типу и количеству двигателей приводы бывают:
— электрические (основной привод) одно- и двухдвигательные;
Наиболее широко применяют канатные лебедки с электроприводом; довольно перспективными являются механизмы подъема с гидроприводом. В пожаро- и взрывоопасных производствах применяют пнемопривод в механизмах подъема грузов.
3. По типу передач механизмы подъема бывают:
— с цилиндрическим редуктором;
— с планетарным редуктором;
— с волновым редуктором (последние пока не нашли должного применения).
Червячные передачи в механизмах подъема устанавливают редко по причине низкого к. п. д. и повышенного износа.
Механизмы подъема груза, кинематические схемы которых даны на рисунке 6.1, состоят из следующих основных частей: полиспаста, грузозахватного устройства, барабана, редуктора, тормоза и двигателя.
Кинематическая схема механизма подъема с крюковой подвескойпоказана на рисунке 6.1, а. Электродвигатель 1 соединен с цилиндрическим редуктором 4 и барабаном 5 при помощи муфт 2, 3; полумуфта 3 со стороны редуктора выполнена с тормозным шкивом, на котором установлен колодочный тормоз. Редукторы могут выполняться с валами по обе стороны для различной компоновки механизмов подъема. На барабан наматывается канат полиспаста 6 с грузозахватным приспособлением 7.
Кинематическая схема механизма подъема с грузовым электромагнитным захватом 8 отличается от обычной наличием дополнительного барабана 9 для наматывания и сматывания токоподводящего кабеля при подъеме и опускании груза (рисунок 6.1, б). Привод этого барабана может осуществляться от канатного барабана с помощью зубчатой или ценной передач, а также от отдельного привода. Вследствие различных скоростей наматывания ветвей каната и кабеля передаточное число передачи 10 между барабанами будет равно
 (6.1)
(6.1)
где  ,
,  — угловые скорости вращения соответственно канатного и кабельного барабанов;
— угловые скорости вращения соответственно канатного и кабельного барабанов;
 (6.2)
(6.2)
 — скорость подъема груза, м/с;
— скорость подъема груза, м/с;  — передаточное число полиспаста;
— передаточное число полиспаста;
 , (6.3)
, (6.3)
 ,
,  — диаметры канатного и кабельного барабанов.
— диаметры канатного и кабельного барабанов.
 (6.4)
(6.4)
В грейферных кранах на тележке устанавливают два одинаковых механизма — один для подъема, другой для замыкания грейфера (рисунок 6.1, в) или двухбарабанную лебедку с планетарной передачей и двумя двигателями (большей мощности для подъема, меньшей — для замыкания грейфера).
 |
Рисунок 6.1 – Кинематические схемы механизмов подъема груза
Механизмы с планетарными редукторами. На рисунке 6.1, г показана кинематическая схема механизма с двухдвигательным приводом и планетарным редуктором. Валы электродвигателей 1, 5 соосны и вращают центральные колеса z1 и z2 различных диаметров. Колеса z1 и z2 приводят во вращение сателлит z4, укрепленный в водиле 3, которое связано с приводной шестерней двухступенчатого редуктора 6, который вращает барабан 7 Вал двигателя 1 проходит внутри пустотелого вала, соединяющего водило с шестерней редуктора.
Механизм подъема позволяет работать на четырех скоростях: 1 — максимальная скорость при вращении обоих двигателей в одном направлении; 2— при вращении только двигателя 1; 3 — при вращении только двигателя 5; 4 — минимальная при вращении двигателей 1 и 5 в противоположных направлениях.
Схема механизма подъема с гидроприводом приведена на рисунке 6.1, д. Особенностью этого механизма является широкий диапазон изменения скоростей, что очень важно для монтажных и механосборочных кранов. Электродвигатель 1 приводит в движение регулируемый насос 2, от которого жидкость под высоким давлением поступает в высокомоментный гидромотор 3 (радиально-поршиевой с дисковым тормозом). От него через муфту и редуктор 4 сообщается вращение барабану 5.
В отдельных случаях применяют механизм подъема груза с открытой зубчатой передачей вместо трехступенчатого редуктора (рисунок 6.1, е). Этот механизм состоит из двигателя 1, муфты с тормозным шкивом 2, тормоза 3, редуктора 4, открытой зубчатой пары 5, барабана 6. С целью обеспечения правильной укладки каната на барабан с многослойной навивкой используют специальное устройство – канатоукладчик (рисунок 6.1, ж). Подъемный канат перед навивкой на барабан 1 проходит через блок 2 между двумя цилиндрическими роликами 4, установленными на каретке 6. Каретка расположена на винте 7 с двойной резьбой, который приводится в движение цепной передачей 3. При вращении винта 7 каретка 6 перемещается по направляющими, обеспечивая правильную укладку каната.
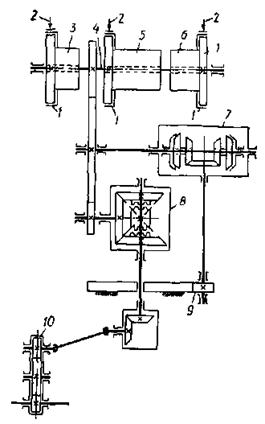
Рисунок 6.2 – Механизм подъема автомобильного крана <с групповым приводом)
Механизмы подъема с групповым приводом. От двигателя внутреннего сгорания автомобиля (рисунок 6.2) движение через редуктор отбора мощности 10, пару конических передач, главный реверс 8, зубчатые передачи передается к барабанам механизма подъема 5, механизма замыкания грейфера 6, механизма изменения вылета 3.
Соединение барабанов с главным валом 4 обеспечивается с помощью фрикционных муфт 1, а торможение – с помощью тормозов 2, располагаемых непосредственно на барабанах этих механизмов. Включение фрикционной муфты сопровождается растормаживанием барабана. С помощью зубчатого реверса 7, зубчатой передачи 9 ведется управление работой крана при повороте.
Полиспасты.
Существуют два основных типа полиспастов: силовые полиспасты и скоростные полиспасты.
Силовой полиспаст – это полиспаст, служащий для выигрыша в силе.
Скоростной полиспаст – это полиспаст, служащий для выигрыша в скорости.
Скоростные полиспасты находят ограниченное применение в тихоходных гидравлических и пневматических механизмах. Блоки в полиспасте делятся на подвижные, перемещающиеся в пространстве, и неподвижные.
Силовые и скоростные зависимости двух типов полиспастов можно проследить на соответствующих подвижных блоках.
Для силового полиспаста (рисунок 6.3, а) натяжение SK и скорость ветви u K каната:
 (6.5)
(6.5)
где Q Г – вес поднимаемого груза, u Г — скорость подъема груза; h — к. п. д. блока.
Для скоростного полиспаста (рисунок 6.3, б) сила на поршне и его скорость будут равны:
 (6.6)
(6.6)
К. п. д. канатного блока учитывает потери на трение в опорах и жесткость каната; h=0,98 для блоков на подшипниках качения и h=0,95 для блоков на подшипниках скольжения.
 |
Рисунок 6.3 – Полиспасты для выиграша в силе (а) и скорости (б)
По конструкции полиспасты бывают одинарные и сдвоенные.
Одинарный полиспаст – это полиспаст, у которого один конец каната подвижный (наматывается на барабан лебедки), а второй – закреплен на подвижной или неподвижной обойме, то есть системе блоков.
Сдвоенный полиспаст – это полиспаст, у которого оба конца каната подвижны, то есть наматываются на барабан.
Одинарные полиспасты. Верхние блоки (обойма) неподвижны (в пространстве), нижние блоки (обойма) подвижны – перемещаются вместе с грузом (рисунок 6.4).
Недостатком одинарных полиспастов является то, что вместе с подъемом груз перемещается также по горизонтали, вследствие чего изменяются величины реакции опор барабана и затрудняется точность установки груза.
 |
 |
Рисунок 6.4 – Одинарные полиспасты:
а – при сбегании каната с неподвижной обоймы, б – при сбегании каната с подвижной обоймы
Для того, чтобы при работе полиспаста большой кратности не происходил перекос подвижной обоймы используются сдвоенные полиспасты (рисунок 6.5). Сдвоенные полиспасты обеспечивают строго вертикальное перемещение груза, реакции в опорах барабана распределяются равномерно.
 |
 |
Рисунок 6.5 – Сдвоенные полиспасты:
а – при сбегании канатов с неподвижной обоймы, б – при сбегании каната с подвижной обоймы
Сдвоенный полиспаст состоит из двух одинарных полиспастов с уравнительным блоком. На барабан (с правой и левой винтовой нарезкой) навиваются две ветви каната полиспаста.
Уравнительный блок – это блок, служащий для уравнивания длин правой и левой ветвей каната сдвоенного полиспаста при неравномерной вытяжке.
Уравнительный блок при подъеме (опускании) груза не вращается. Диаметр уравнительного блока принимают меньше, чем у основних блоков, и располагается он по оси симметрии сдвоенного полиспаста: в верхней обойме при четной (рисунок 6.5, б) и в нижней (рисунок 6.5, а) при нечетной кратности.
Полиспасты характеризуются кратностью или передаточным числом u П. Кратность силового полиспаста показывает – во сколько раз позволяет этот полиспаст выиграть в силе.
Кратность полиспаста – это отношение скорости навивки каната на барабан к скорости подъема груза.
Кратность полиспаста определяется по формуле:
 (6.7)
(6.7)
где  — скорость каната, наматываемого на барабан,
— скорость каната, наматываемого на барабан,  — скорость подъема груза.
— скорость подъема груза.
С другой стороны, кратность одинарного полиспаста равняется числу ветвей каната, на которых висит груз. Для сдвоенных полиспастов кратность равна половине числа ветвей, на оторых висит груз.
Для одинарного полиспаста m является кратностью или передаточным числом = m.
Кратность сдвоенного полиспаста
 , (6.8)
, (6.8)
где m – число ветвей каната полиспаста, на которых висит груз.
Кратность полиспастов механизмов подъема зависит от грузоподъемности и определяется технико-экономическими расчетами. Чем больше кратность полиспаста, тем меньше диаметры каната (но не менее допустимого), блоков и барабана и меньше передаточное число редуктора, масса и габариты, но с другой стороны при этом увеличиваются длины каната, барабана и число блоков.
На основании технико-экономических расчетов и практического опыта установлены пределы оптимальных значений кратности полиспастов в зависимости от грузоподъемности кранов общего назначения:
Q Г, т 5 10…15 20…30 40…50 75…125
В неподвижном полиспасте сила натяжения во всех каната одинакова:
 (6.9)
(6.9)
При подъеме груза вследствие потерь в блоках на трение и от жесткости каната при изгибе натяжение в ветвях каната распределяются неравномерно. Поэтому эти потери учитываются к. п. д. полиспаста h ПОЛ.
Вывод к. п. д. одинарного полиспаста.
Пусть дан одинарный полиспаст (рисунок 6.6), у которого канат сбегает с подвижного блока. Примем, что к. п. д. блоков известно и к. п. д. подвижных и неподвижных блоков равны.
N ПОЛ – полезная мощность, затрачиваемая на подъем груза,
N ПОЛН – полная мощность, затрачиваемая на подъем груза,
SK, u K – усилие и скорость каната, который наматывается на барабан лебедки,
Q Г, u Г – вес и скорость поднимаемого груза,
 |
Рисунок 6.6 – Расчетная схема одинарного полиспаста
К. п. д. полиспаста – это отношение полезной мощности к полной мощности, затрачиваемой на подъем груза,
 (6.10)
(6.10)
Как видно из расчетной схемы полиспаста, представленного на рисунке 6.6, усилие в ветви каната, идущего на барабан лебедки, везде одинаково и составляет S1=SK.
Когда канат пройдет через нижний блок, усилие во второй ветви каната будет меньше из-за потерь на трение, которое учитываем к. п. д. блока, тогда S2=S1×h=SK×h.
Когда канат пройдет через верхний блок, усилие в третьей ветви каната будет S3=S2×h=SK×h 2 и т.д.
Тогда усилие в n-ой ветви каната составит Sn=SК×h n -1 .
Составим уравнение равновесия системы, представленной на рисунке 6.6,
 (6.11)
(6.11)
Вынесем SК за скобки:

Разделим полученное уравнение на SК

Подставим полученное выражение в уравнение (6.10) и определяем к. п. д. одинарного полиспаста, у которого канат сбегает с подвижной обоймы,
 . (6.12)
. (6.12)
Аналогично можно вывести к. п. д. одинарного полиспаста, у которого канат сбегает с неподвижной обоймы. В результате получим:
 . (6.13)
. (6.13)
Тогда при одинарном полиспасте усилие в канате, наматываемом на барабан лебедки, с учетом потерь на трение составит:
 (6.14)
(6.14)
При сдвоенном полиспасте усилие в одной ветви каната, наматываемом на барабан лебедки, с учетом потерь на трение составит:
 (6.15)
(6.15)
где m – число ветвей каната полиспаста, на которых висит груз.
Дата добавления: 2018-10-18 ; просмотров: 1057 | Нарушение авторских прав
Подъемные механизмы – специальные элементы, которыми комплектуются грузовые устройства. Подъемные механизмы помогают поднимать и транспортировать людей, всевозможные виды грузов, вертикально и наклонно. Это механизмы: передвижения, подъема, поворота и прочие. Грузоподъемные приспособления используют в подъемных кранах, манипуляторах, лифтах и в прочих устройствах.
Грузоподъемность, т: 1; 2; 3; 5
Грузоподъемность, т: 0,5; 1; 2; 3; 5; 10
Грузоподъемность, т: 0,8; 1,6; 3,2
В данном разделе представлен широкий круг простых и одновременно надежных грузоподъемных механизмов, основная часть которых оснащена ручным приводом.
Автоматические и ручные подъемные устройства представлены следующими изделиями: это таль , таль ручная, таль цепная. Они бывают двух видов — с приводом от цепи и приводом от рычага. Сам способ подъема у них одинаков, а в качестве подъемных средств применяется высокопрочные калиброванные цепи. Тали с цепным приводом или цепные тали предназначены для подъема груза, когда оператор находится на уровне пола. В этом случае таль или таль ручная цепная подвешивается на перекрытиях потолка или на специальных конструкциях. Таль с приводом от рычага или таль рычажная – это подъемные агрегаты, предназначенные для подъема грузов в тех случаях, когда таль рычажная находится на уровне оператора. При необходимости рычажные тали могут работать и на перемещении грузов в горизонтальной плоскости.
Часто бывает так, что груз мало поднять, его нужно еще и переместить. Для этого существуют монорельсовые тележки или каретки, на которые можно подвесить таль. Перемещаются каретки по монорельсу, выполненному из двутавровой балки.
Основной недостаток, которым выделяются эти модели грузоподъемных устройств, — невысокая скорость подъема, что ограничивает высоту подъема — до 12 метров. Все грузоподъемные площадки, кроме кареток, имеют фрикционный тормоз, который автоматически срабатывает при остановке движения и автоматически выключается при начале движения.
Следующее устройство, которое мы предлагаем, – это домкраты. С этими механизмами знаком каждый, кто имеет автомобиль, дом в деревне или дачу, поскольку мы их применяем для подъема автомобиля при замене колеса или для подъема дома, чтобы отремонтировать фундамент или заменить нижние бревна стены. Домкраты делятся на гидравлические и механические. Представитель гидравлических домкратов – это классический ручной грузоподъемник, домкрат бутылочного типа. Минимум деталей при максимуме возможностей. Различные модификации этих грузоподъемных механизмов позволяют поднимать грузы практически с земли, причем на очень приличную высоту. Мы представляем цепочку домкратов, которые имеют встроенный в корпус гидравлический насос, или автономные домкраты, не зависящие от электропитания и дополнительного оборудования.
Механические домкраты имеют подъемный привод двух видов – это реечный (реечные домкраты) и винтовой (винтовые домкраты). Высота подъема ограничивается только длиной винта или рейки. При очевидной простоте конструкции основными недостатками являются относительно большой вес изделия и значительные мускульные усилия при работе.
Наконец, очень яркие представители грузоподъемного оборудования – лебедки.
На данной линейке представлены лебедки с ручным и электрическим приводом. Лебедки с ручным приводом или ручные лебедки делятся на два вида – рычажное грузоподъемное оборудование и с приводом от вращающейся рукоятки.
Рычажные лебедки применяются, в основном, для перемещения груза в горизонтальной плоскости, для натягивания проводов воздушных линий электропередачи или связи. Основным представителем грузоподъемного оборудования является монтажно-тяговый механизм или МТМ. Основой его работы является протягивание стального каната через лебедку. МТМ – простой и надежный подъемный агрегат, что компенсирует его основной недостаток – низкую скорость протяжки каната.
Другая разновидность рычажных лебедок — это лебедки с приводом от рычага и намоткой стального каната на барабан. Очень похожи на рычажные тали, но более удобны при работе с грузами в горизонтальной плоскости.
Лебедки с ручным приводом от вращающейся рукоятки и намоткой каната на барабан универсальны в применении. Этот подъемный механизм позволяет грузы и поднимать, и перемещать. Области применения самые широкие: от подъема люстры до монтажа самых сложных конструкций в машиностроении и строительстве. Это грузоподъемное приспособление отличается большой канатоемкостью барабана — от 10 до 75 метров. Поскольку человек всегда старался облегчить свой труд, то к ручной лебедке подсоединили электродвигатель и получилась лебедка электрическая, возможности которой возрастали по мере увеличения областей ее применения. Мы предлагаем подъемные механизмы, которые применяются, в основном, для монтажа и строительства. Питание лебедок от сети переменного тока напряжением от 220 до 380 Вольт, грузоподъемностью от 200 кг до 15 тонн и канатоемкостью до 470 метров.
Мы предлагаем грузоподъемное оборудование в широком ассортименте. Также у нас вы найдете небольшую линейку железнодорожных или маневровых электрических лебедок. Они заменяют маневровый подвижной состав на небольших участках железнодорожных узлов там, где требуется сформировать состав или подать вагоны под разгрузку или погрузку.
Чтобы купить грузоподъемные механизмы, достаточно оформить заявку на сайте компании.
Гордень — одношкивный блок с пропущенным через него тросом; для выигрыша в силе в такелажном деле используют хват-тали и гини (рис. 137).
Тали — это полиспаст, т. е. система одношкивных блоков (двух и более) с одним тросом, предназначенных для совместной работы. Чаще всего применяют тали в виде двух блоков с одним-тремя шкивами в каждом. Наиболее широко используются хват-тали, имеющие один блок подвижной, а другой (верхний) блок в виде двойных талей.
Гинями называют тали, имеющие два блока с тремя и более шкивами в каждом. Многошкивные блоки (более трех) применяют редко, они имеют особую конструкцию и применяются лишь в специальных устройствах. Гини — самые большие тали, служащие для подъема больших тяжестей; они отличаются от обычных талей большими размерами блоков и толщиной каната-лопыря.
Трос, соединяющий два блока для совместной работы, называют лопарем талей. Конец, с помощью которого лопарь заделывают наглухо в обух верхнего или нижнего блока, называют коренным лопарем, а конец, выходящий из верхнего блока, за который тянут при подъеме груза или травят при его опускании, называют ходовым лопарем; остальные ветви троса талей называют ветвями лопаря, число которых равно числу шкивов обоих блоков.
Тали бывают с двумя одношкивными блоками, с одним одношкивным и одним двушкивным; с двумя двушкивными блоками, с одним двушкивным и одним трехшкивным и, наконец, с двумя трехшкивными блоками (гини). Следовательно, ветвей лопаря может быть от трех до семи.
Для талей применяют растительные канаты и стальные тросы, а также такелажные цепи.
Механические тали — тали, которые называют дифференциальными. Существуют также системы дифференциальных талей с винтовой передачей и тали с зубчатой передачей.
Для подъема грузов на небольшую высоту применяют ручные тали; по грузоподъемности тали выпускаются 1—10 т, их изготовляют зубчатыми с шестеренчатым и червячным приводами.
Ручные тали с червячным приводом состоят из крюка, на котором их подвешивают к конструкциям, верхнего стального неподвижного блока, на ободе которого нарезаны зубья для сцепления с элементами цепной передачи; этот приводной блок связан с червяком. Сварная калиброванная цепь, выполненная замкнутой бесконечной, перекинута через приводной блок, вращающийся от перебирания цепи руками. Во время вращения приводного блока с червяком вращается и червячная шестерня, соединенная со звездочкой. Если вручную перебирать цепь вращения приводного блока, червяк будет вращаться и передавать вращение верхнему блоку вместе с грузовой цепью, расположенной на гнездах звездочки. Через нижний блок (малого диаметра) талей и верхнюю звездочку проходит грузовая цепь. При вращении червячной шестерни со звездочкой грузовая цепь сокращается по длине и поднимает груз. Для подъема груза ручными талями необходимо приложить к цепи тяговое усилие в 33—68 кгс (в зависимости от поднимаемого груза).
Подъем груза с помощью механических талей с шестеренчатым приводом происходит так же, как и подъем груза талями с червячным приводом. Однако в первом случае подъем груза осуществляется в параллельной плоскости, в которой вращается приводной блок, а при червячной передаче во взаимно перпендикулярных плоскостях. Для уменьшения усилий подъема делают две шестеренчатые передачи (рис. 138).
Ручные механические тали имеют ограниченный радиус действия, они могут поднимать груз только в месте закрепления.
Для расширения радиуса действия талей, их подвешивают к тележке, которая передвигается по путям, выполненным из двутавровых балок, подвешенных к перекрытиям цеха.
Более совершенным грузоподъемным приспособлением является тельфер — электрическая таль с тележкой, передвигающейся по монорельсу. Подъемным механизмом у тельфера служит электромотор, соединенный с барабаном, заменяющим верхний блок талей. Подъемом и перемещением тельфера управляют через пульт с кнопками на гибком проводе. Тельферы могут перемещаться и на значительные расстояния с помощью троллея — токонесущего провода, расположенного сбоку монорельсов или над ними.
В судостроении и судоремонте используют также шпили и лебедки. Они бывают ручные и электрические.
Ручная лебедка имеет прочное и массивное основание, станину, основной барабан (с горизонтальной осью), валы с шестернями для изменения скоростей, тормоз и рукоятки для приложения мускульной силы. Ручные лебедки изготовляют грузоподъемностью 0,5; 1,0; 3,0; 5 т. При работе с такими лебедками применяют канифос-блоки и тали. Канифос-блоки служат для отвода троса, идущего на барабан, а тали — для получения большего выигрыша в силе.
Шпиль, в отличие от лебедки, имеет вертикальную ось вращения. Шпили и лебедки работают обычно на малой скорости с большими тяговыми усилиями. При подъеме легких грузов пользуются одной ветвью троса (шкентелем), а при подъеме тяжелых грузов применяют тали.
Электрические шпили (рис. 139) и лебедки работают на берегу от электростанции или подстанции завода, а на судне — от генератора. Вал с барабаном на них приводится во вращение электродвигателем. Для управления ими применяют контроллеры и пусковые реостаты. Поворачивая рычаг пускового реостата в ту или другую сторону, механизмам сообщают нужный ход.
Перед подъемом грузов необходимо проверить правильность вращения лебедки (или шпиля), определить пригодность ее для данной работы. Особое внимание следует обратить на исправность стопора. При неисправности стопора и тормоза лебедка работать не может.
Для подъема тяжелых машин и агрегатов на небольшую высоту и передвижения их на незначительные расстояния, а также выполнения различных такелажных работ применяют домкраты. Их преимущества: малая масса, большая грузоподъемность, простота конструкции, легкость устройства торможения и удобство обращения.
Домкраты бывают: винтовые, гидравлические, воздушные и с зубчатой рейкой; их общим недостатком является сравнительно низкий к. п. д. Грузоподъемность домкратов достигает 20—25 т. Средняя высота подъема грузов 400 мм, масса реечных и винтовых домкратов колеблется в пределах от 5 до 120 кг.
В эксплуатации механизмов широко применяют канатно-веревочные изделия и такелажные цепи.






