Датчики перемещения
По виду выходного сигнала
По принципу действия.
Различают два вида датчиков:
а) параметрические (или пассивные), в которых изменение контролируемой величины х сопровождается соответствующими изменениями активного, индуктивного и емкостного сопротивлений датчика. Наличие постороннего источника энергии вида z (см. рис. 1.1, б) является обязательным условием работы параметрического датчика;(Пр. датчик температуры сист охл).
К ним относят: электроконтактные, тензометрические, потенциометрические, индуктивные, емкостные
б) генераторные (или активные), в которых изменение контролируемой величины х сопровождается соответствующими изменениями ЭДС на выходе датчика (например, возникновение ЭДС может происходить вследствие термо-, пьезо-, фотоэффекта и других явлений, вызывающих появление электрических зарядов). Эти датчики выполняются по схеме, приведенной на рис. 1.1, а, т.е. они не требуют дополнительного источника энергии вида г, так как энергия на выходе элемента полностью берется с его входа (вследствие чего мощность выходного сигнала всегда меньше мощности входного сигнала).(пр: термопара) .
2.По виду входного сигнала
Различают: температуры, давления, разрежения, расхода, уровня, состава, плотности, влажности, перемещения, скорости, ускорения и др.
Делятся: изменение сопротивления, индуктивности, емкости и др.
Контактные датчики — это датчики параметрического типа, в которых изменяется электрическое сопротивление при изменении той или иной механической величины. Они предназначены для преобразования механического перемещения в электрический сигнал. При достижении измеряемой величиной определенного значения замыкаются или размыкаются электрические контакты, включенные в те или иные цепи, которые сигнализируют, что перемещение больше или меньше определенного значения.
Контактные датчики широко применяются в системах автоматического контроля и сортировки размеров, а также в системах автоматической сигнализации различных физических величин. Статическая характеристика контактного датчика имеет релейный характер, так как его выходная величина — сопротивление электрической цепи — изменяется скачком.
На рис. 5.1, а изображен простейший контактный датчик с одной парой контактов — однопредельный. Замыкание контактов/и 2 происходит в результате изменения размера изделия И. Если размер изделия И увеличивается, то измерительный щуп 3 перемещается вверх, в результате чего контакты 1 и 2 приходят в соприкосновение. При этом активное сопротивление между контактами 7 и 2 изменяется от бесконечности до ничтожно малого значения, определяемого контактным сопротивлением. Выводы датчика подключаются к сигнальному устройству. Пружина 4 соединяет измерительный щуп 3 с одним из выводов.

На рис. 5.1, б изображен двухпредельный контактный датчик — с двумя парами контактов, способный реагировать на перемещение щупа в обе стороны от начального (нулевого) положения. Подобные датчики широко используются для автоматического контроля размеров деталей и подсчета количества выпускаемой продукции.
Многопредельный контактный датчик с несколькими парами контактов показан на рис. 5.1, в. Его контакты 1, 2′ и 3′ замыкаются последовательно друг за другом в зависимости от размеров деталей. Стрелка измерительного прибора, включенного на выходе датчика, показывает три размера.
Иногда контактные датчики могут работать либо на замыкание (размыкание) всей цепи, либо на замыкание части одного из сопротивлений R резистора цепи (рис. 5.1, г).
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: На стипендию можно купить что-нибудь, но не больше. 9028 —  | 7255 —
| 7255 —  или читать все.
или читать все.
91.146.8.87 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
Электроконтактный преобразователь – это устройство, преобразующее линейное перемещение в электрический дискретный сигнал-команду путем замыкания или размыкания электрических контактов. Команда от преобразователя в станках или контрольных автоматах обычно реализуется путем коммутации достаточно мощных электрических цепей станка или автомата, которые приводят в действие его исполнительные органы. Поэтому электрический сигнал-команду преобразователя усиливают специальным усилителем, а коммутация внешних выходных электрических цепей осуществляется обычно с помощью электромагнитных реле. Все это вместе образует блок усилителя командных сигналов. Светофорное устройство служит для информации о командах. Блок питания предназначен для поддержания параметров питания на заданном уровне.
По назначению электроконтактные преобразователи разделяются на предельные, предназначенные для контроля размеров детали, и амплитудные, предназначенные для контроля отклонений от правильной геометрической формы.
В предельных преобразователях (рисунок 5.19) каждому значению размера детали 1 соответствует определенное положение подвижного контакта 7 относительно неподвижных (настраиваемых) контактов 6 и 8. Когда деталь больше максимально допускаемого размера, замкнуты контакты 7 и 6, когда меньше – замыкаются контакты 7 и 8, и, наконец, когда деталь годная, все контакты разомкнуты.

Рисунок 5.19 – Принципиальная схема предельного электроконтактного преобразователя
В конструкции преобразователя используется двуплечий рычаг 2 с передаточным отношением i=l2/l1 и измерительный шток 3, контактирующий с поверхность контролируемой детали 1. Силовое замыкание измерительного штока, рычага осуществляется пружинами 4 и 5.
В амплитудных преобразователях, для исключения влияния размера на результаты контроля отклонения поверхности от правильной геометрической формы, контакт 7 выполнен «плавающим», т.е. он под действием некоторого усилия может перемещаться в направляющей рычага.
Технические характеристики предельных (модели 233, 228, 229) и амплитудного (модели КДМ-14) электроконтактных преобразователей приведены в таблице 5.7.
Таблица 5.7 – Технические характеристики электроконтактных преобразователей
| Параметры | Модель | |||
| КДМ-14 | ||||
| Число контактов | ||||
| Пределы измерения, мм | 0 — 0,4 | 0 — 1 | 0 — 1 | 0 — 3 |
| Свободный ход измерительного стержня, мм | ||||
| Передаточное отношение | ||||
| Цена деления настроечного винта, мм | 0,001 | 0,002 | 0,002 | 0,005 |
| Измерительное усилие, сН | 30-60 | |||
| Колебание усилия, сН | ||||
| Погрешность срабатывания, мм | 0,0005 | 0,001 | 0,001 | 0,002 |
| Смещение настройки за 25тыс. срабатываний, мм | 0,0005 | 0,001 | 0,001 | 0,004 |
| Предельная скорость арретирования, мм/с | до 60 | до 60 | до 60 | до 60 |
| Габаритные размеры, мм | 83*48*16 | 136*66*21 | 136*66*21 | 93*48*17 |
| Масса, г |
На рисунке 5.20 показана конструкция предельного электроконтактного преобразователя модели 233.
Измеряемое перемещение воспринимается измерительным стержнем 2, который перемещается в бронзовых втулках 1 гильзы 3. Гильза запрессована в жесткий корпус 5 преобразователя, ее наружный размер Ø 8 h6 предназначен для крепления преобразователя. Для исключения поворота измерительного стерженя установлен штифт-шпонка 14. Перемещение измерительного стержня через корундовую сферическую опору 17 передается на рычаг 9, установленный на агатовой ножевой опоре 8. Кинематическая цепь стержня и рычага с подвижными контактами 7 замыкается пружиной 4 с усилием которое должно быть несколько большим, чем необходимое усилие замыкания электрических контактов. Передаточное отношение двуплечего рычага 9 преобразователя равно i=5.

Рисунок 5.20 – Предельный электроконтактный преобразователь модели 233
Следует обратить внимание на то, как предохранены рычаг и его высокоточная ножевая опора от случайных ударов по измерительному стержню. Измерительный стержень так контактирует с рычагом, что при ударе он может оторваться от рычага, но не передаст удара на него. В технической литературе такое конструктивное решение называют: «рычаг разгружен от удара».
Измерительное усилие создается пружиной 12, его можно регулировать гайкой 11. Положение настроечных контактов 13 регулируют с помощью микровинтов (М4×0,35), барабаны 10 которых имеют цену деления 0,001 мм, а интервал делений 0,63 мм. Устранение заказов в настроечных винтах 13 обеспечивается осевым натягом с помощью разрезной пружинной шайбы 16 и специальной гайки 15.
Контакты 7 запрессованы во втулках 6 из электро-изоляционного материала, а настроечные контакты 13 не изолированы от корпуса. На электрический разъем преобразователя выведено три провода: от корпуса преобразователя и от двух контактов 7. Наличие неизолированных контактов уменьшает область применения данного преобразователя, так как некоторые электрические схемы требуют изоляции всех контактов.
Лицевая сторона корпуса закрыта прозрачной крышкой 18.
Дата добавления: 2015-05-08 ; просмотров: 1711 | Нарушение авторских прав
Читайте также:
- Генераторные преобразователи
- Генераторные преобразователи. Пьезопреобразователь.
- ДВУХЪЯКОРНЫЕ ПРЕОБРАЗОВАТЕЛИ
- Емкостные преобразователи линейных перемещений
- Индуктивные преобразователи
- Кондуктометрические преобразователи.
- Механотронные преобразователи
- ОДНОЯКОРНЫЕ ПРЕОБРАЗОВАТЕЛИ ПЕРЕМЕННОГО ТОКА В ПОСТОЯННЫЙ
- ОДНОЯКОРНЫЕ ПРЕОБРАЗОВАТЕЛИ ПОСТОЯННОГО ТОКА
- Пневматические преобразователи
- Преобразователи для изменения вибраций.
- Преобразователи на магнитном эффекте.
Классификация первичных измерительных преобразователей
В зависимости от методов преобразования измерительного импульса нашли практическое применение преобразователи, использующие следующие методы:
10) ультразвуковой и др.
Принципиально для контроля размеров можно применить и другие методы или сочетание перечисленных.
Электроконтактные преобразователи наиболее просты и поэтому наиболее распространены при осуществлении контроля предельных размеров изделия.
Однако большинство схем с электроконтактными преобразователями не дает возможности определить действительный размер детали. Индикаторы, встроенные в преобразователь для отсчета измеряемых величин, загромождают рабочее пространство и неудобны при одновременном контроле многих размеров. Поэтому для многомерных устройств целесообразно применять пневматические измерители.
Если необходимо передать информацию о размере детали на достаточно большое расстояние, то перед пневматическими приборами имеют преимущества индуктивные, емкостные и тому подобные преобразователи. Поэтому для конкретного случая контроля размеров деталей необходимо рассматривать все существующие типы преобразователей и выбирать наилучший.
По назначению разделяются на предельные, служащие для определения попадания размера контролируемой детали в поле допуска, и амплитудные, предназначенные для контроля отклонения формы и правильности взаимного расположения поверхностей.
По числу контактных пар электроконтактные датчики (ЭКД) подразделяются на одноконтактные, двухконтактные, трехконтактные, многоконтактные.
В зависимости от передаточного отношения от измерительного наконечника до электрических контактов различают:
1) безрычажные ЭКД (i = 1) (рис. 2.1);
2) рычажные (i > 1) (рис. 2.2).
Безрычажные датчики просты, имеют малые размеры и массу, а при расположении контактных пар на продольной оси измерительного наконечника — наибольшую точность контроля.
 |
|
| Рис. 2.1.Безрычажный ЭКД | Рис. 2.2. Рычажный ЭКД |
Рычажные датчики,как правило, сложны и имеют большие размеры по сравнению с безрычажными. Передаточное отношение этих датчиков обычно не превышает 50. С его увеличением снижается погрешность настройки микрометрических винтов, но возрастает число передаточных звеньев, что в свою очередь вносит некоторые дополнительные погрешности. Дополнительные передаточные звенья, кроме того, увеличивают динамические погрешности. Применение рычажных датчиков с большими i целесообразно в случае оснащения последнего звена не только контактами, но и стрелкой-указателем для визуального отсчета.
Рычажные схемы датчиков позволяют сконструировать и многоконтактные системы для многодиапазонной рассортировки изделий. Большинство конструкций рычажных датчиков имеет один передаточный рычаг. Погрешность контроля при i рычагах составит

где n1, n2, …, ni — передаточные отношения первого, второго и т.д. до i-гo рычага; Z1, Z2, . Zi — погрешность первого, второго и т.д. до i-гo рычага; у — погрешность контактной пары (погрешность настройки).
Таким образом, погрешность настройки уменьшается в n раз (n — общее передаточное отношение), а погрешность передачи возрастает пропорционально n. Поэтому, если необходимо соблюдать передаточное отношение n при помощи одного рычага, то погрешность составит

Если то же передаточное отношение создается двумя рычагами, то эта погрешность будет

Следовательно, при одинаковой погрешности рычагов Z1 = Z2 передача из двух рычагов менее точна на величину Z1/n1, так что ее следует применять лишь в тех случаях, когда ограниченные размеры не позволяют использовать более длинные плечи одного рычага.
Качество работы ЭКД в значительной степени зависит от правильного режима работы и конструкции самих контактов. Этот режим определяется следующими физическими явлениями, происходящими в контактных парах: пробоем газового промежутка, эрозией и коррозией контактов.
Пробой газового промежутка между контактами. Напряжение, при котором происходит пробой газового промежутка между контактами, связано с параметрами контактов следующей зависимостью (для воздуха) (рис. 2.3):

где l — расстояние между контактами, см; Р — давление газа (воздуха), находящегося между контактами, кг/см; γ — число электронов, освобождаемых из металла катода одним положительным ионом при ударе о поверхность катода.
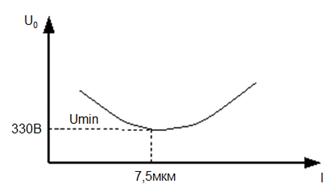 |
| Рис. 2.3. Зависимость напряжения пробоя газового промежутка от расстояния между контактами |
Величина напряжения, при котором происходит пробой газового промежутка, в общем случае зависит от состава газа и материала катода.
Таким образом, при напряжении на контактах меньшем, чем U0, пробой не может наступить ни при каких расстояниях между контактами.
Эрозия контактов.Эрозия (электрический износ) происходит как при образовании дуги и искры между контактами, так и при их отсутствии. Эрозия второго типа происходит из-за переноса частиц металла с анода на катод. Тогда при размыкании и замыкании контактов под действием электрических сил между контактами образуются металлические "мостики", которые либо оплавляются, либо при размыкании разрываются и остаются на катоде, в результате чего на аноде получаются углубления, а на катоде — выступы. Особенно большая эрозия контактов будет при образовании дуги между контактами. Установлена зависимость между током и напряжением дуги
где UД — напряжение дуги; U0 — предельное минимальное напряжение, соответствующее потенциалу ионизации паров металла анода; i — ток дуги; iМ — предельный минимальный ток дуги; PД — минимальная мощность, зависящая от скрытой теплоты испарения материала анода.
Если контакты работают в цепи, имеющей сопротивление R и индуктивность L, при постоянном напряжении источника тока, то для этих условий будет справедливо уравнение
Дуга будет стабильно гореть, если ток i неизменен, то есть  = 0, тогда UД = U – iR.
= 0, тогда UД = U – iR.
Таким образом, необходимым и достаточным условием невозможности образования стабильной дуги для любых значений тока является выполнение неравенства U -iR 2 ; п = 0,6.
Контактное усилие в этом случае должно быть > 30 — 50 г. Вольфрамовые контакты целесообразно применять в безрычажных датчиках и датчиках с передаточным отношением не более 5:1.
На работу ЭКД влияет также конструктивное оформление электрических контактов. Контактные пары должны иметь выпуклую (сферическую) форму большого радиуса одного контакта и плоскую форму другого (рис. 2.4). При таком выполнении контактных пар на точность настройки датчика меньше влияют люфты регулируемых контактов.
 |
| Рис.2.4. Конструктивное оформление электрических контактов |
Чаще всего регулируемые контакты крепятся в корпусе датчика, а нерегулируемые — на подвижных деталях. Нерегулируемые контакты могут быть жесткими, подвижными (для создания свободного хода) и плавающего типа с фрикционным оформлением электронной парой. Регулируемые контакты служат для точной настройки датчика (рис. 2.5).
 |
| Рис. 2.5. Конструкция регулируемых контактов: 1 — микрометрический винт; 2 — контакт; 3 — микрометрическая гайка; 4 — гайка, вместе с пружиной 6 служит для выбора люфта в резьбовой паре; 5 — головка винта (лимб); 6 — распорная пружина; 7 — гайка крепления узла в корпусе |
При точной регулировке стремятся не только уменьшить шаг винтовой пары, но и сделать дифференциальными винтовые пары.
Многокомандные электроконтактные преобразователи
Рассмотрим конструкции ЭКД. Наиболее прост, имеет малые размеры и массу рычажный датчик модели 233 (рис. 2.6). Он относится к группе малогабаритных датчиков и предназначен для установки в контрольных автоматах. Датчик состоит из корпуса 1, измерительного штока 2, рычага 3 с подвижными контактами 4 и 5, регулируемых контактов 6 и 7.
Измерительное усилие не превышает 300 гс. Погрешность измерения ±1 мкм. Сортирует изделия на три группы: "годные", "брак +", "брак -". Недостатком этого датчика является то, что последний не позволяет получать большое количество команд, и малый интервал деления шкал настроечных винтов затрудняет настройку при введении поправки на размер настроечной детали.
 Рис. 2.6. ЭКД модели 233 Рис. 2.6. ЭКД модели 233 |
Электроконтактный датчик И-29 предназначен для многодиапазонной сортировки деталей. В зависимости от поставленной задачи датчик может производить сортировку деталей на 50 и более групп с интервалом 1—2 мкм. Как видно из схемы (рис. 2.7), основная отличительная особенность датчика состоит в том, что один из его контактов 5 выполнен в виде архимедовой спирали, на одной оси которой расположен ползун 6, скользящий по контактной схеме. Процесс контроля и сортировки происходит следующим образом. На измерительную позицию вводится контролируемая деталь, на которую опирается измерительный стержень 1. В зависимости от размера детали измерительный шток 1, рычаг 2 и контакт 3 займут определенное положение. После этого включается серводвигатель, вращающий спиральный контакт и ползун 6. При определенном угле поворота спиральный контакт 5 замыкается с контактом 3; при этом подается командный импульс на счетное устройство в целях фиксации числа контактов, через которые прошел ползун 6 от нулевого положения до момента замыкания контактов 3 и 5. Число считанных контактов соответствует номеру сортировочной группы. Продолжительность измерительного периода не превышает 1 с; погрешность ±0,3 мкм, Ризм
 |
|
| Рис. 2.7.Электроконтактный датчик И-29 | Рис. 2.8. Принципиальная схема сортировочного датчика БВ-929 с электромагнитным управлением |
Сортировочный датчик БВ-929 с электромагнитным управлением, разработанный в Бюро взаимозаменяемости (БВ), позволяет простыми методами производить сортировку деталей на большое число групп. Принципиальная схема датчика изображена на рис. 2.8.
Стальная пружина 1, закрепленная в виде консольной балки, притягивается электромагнитом 2. Величина прогиба пружины зависит от притягивающей силы электромагнита, которая в свою очередь зависит от величины тока, протекающего через обмотку электромагнита. На свободном конце пружины укреплен контакт 3. На измерительном стержне 6 помещен второй контакт 4. Замыкание контактов регистрируется с помощью электрической лампочки 5. Ток, протекающий через обмотку электромагнита, поступает от источника питания 10, регулируется элементом 8 и контролирующим прибором 9. Размер контролируемого изделия 7 определяет положение контакта 4, а ток, протекающий через обмотку электромагнита, определяет прогиб пружины 1, то есть положение контакта 3. При определенном токе, протекающем через обмотку, контакты замкнутся. Таким образом, размер изделия и величина тока взаимосвязаны, что позволяет сортировать изделия на большое число групп с высокой точностью.
На практике изменение тока происходит путем переключения резисторов автоматической релейной цепочкой. При последовательном срабатывании звеньев релейной цепочки контакт на пружине датчика сближается с контактом на измерительном штоке, скачком перемещаясь на величину одной группы при срабатывании каждого последующего реле. Работа релейной цепочки мгновенно прекращается на том звене, на котором произошло замыкание контактов датчика. На светофорном табло при этом загорается лампа, сигнализирующая номер размерной группы. Одновременно с этим выдается команда на магнит, открывающий соответствующий ручей, куда направляется проконтролированная деталь. Пределы сортировки 0-0,2 мм. Минимальный размер группы 1,5-2 мкм. Погрешность сортировки ±0,5 мкм.
На базе миниметра "Карл-Цейс" в Бюро взаимозаменяемости разработан многоконтактный рычажный датчик мод. БВ-6048 (рис. 2.9).
Стрелка 1 несет на себе пластину-якорь 2 и в спокойном состоянии притягивается электромагнитом 3, замыкая соответствующий контакт ряда 4. Указатель-стрелка 1 с магнитным якорем крепится при помощи плоской пружины к оси 5. При включении электромагнита 3 стрелка притягивается и замыкает один из контактов ряда 4. Для того, чтобы не замкнулось сразу два контакта, служат нож и гребенка 6. Стрелка остается притянутой до тех пор, пока под измерительный стержень не поступит следующая деталь. После притягивания стрелки на контакты датчика подается ток и выдается команда на отнесение детали к определенной сортировочной группе. Подача тока на контакты датчика в тот момент, когда они замкнуты, уменьшает их эрозионный износ и позволяет применять большую электрическую нагрузку (обычно подается напряжение до 40 В и ток до 0,5 А на замыкающиеся в движении контакты датчика).

Рис. 2.9. Принципиальная схема многоконтактного
датчика модели 6048
Электрические схемы включения электроконтактных
Электрические схемы включения электроконтактных преобразователей могут быть сигнальные, подающие сигнал годности или брака с помощью сигнальных лампочек разного цвета или звуков; и управляющие, производящие включение и выключение различных механизмов управления (открывание заслонок, включение электромагнитов и т.д.).
Схемы выполняются двух основных видов:
1) с "силовым контактом";
2) с "сеточным контактом" (разгрузочного типа).
В схемах первого вида предусматривается такое включение ЭКД в исполнительную схему, при котором управляемые контакты непосредственно включают в цепь исполнительные реле, сигнальные лампы и т.п.
В схемах с "сеточным контактом" ЭКД включается в цепь сетки электронной лампы, а исполнительный орган (реле) — в анодную цепь лампы. Такие схемы более удобны, хотя и более сложны. Разделение цепей измерительных контактов и контактов исполнительного органа дает возможность подбирать параметры этих цепей таким образом, чтобы получать наивыгодный режим работы как измерительных контактов ЭКД, так и контактов управления исполнительным органом.
Примером схем первого типа может служить электрическая схема светофорного блока к эльмиллимессу фирмы "Карл-Цейс" (рис. 2.10).
Применяется для ЭКД с большим передаточным отношением (эльмиллимесс и эльцентимесс).
В блоке, предназначенном для подключения эльмиллимесса, контакты датчика включены по схеме силового контакта в цепь постоянного тока с типовым поляризованным реле, контактные пары Р1 и Р2 которого включают лампы Л1, Л2 и Л3 светофора. Поляризованное реле имеет дополнительную контактную пару для подключения исполнительного устройства, которая получает команду в момент замыкания одного из контактов датчика. Зажимы от дополнительных контактов реле выведены на гнездо на задней стенке корпуса блока. Контакты выдерживают напряжение 24 В, ток 2 А. Блок питается от сети переменного тока. На контакты датчика подается напряжение 6 В при силе тока 1400 мкА.
Пример схем с "сеточным контактом" — схема светофорного блока модели БВ-1058 (рис. 2.11).
Блок БВ-1058 предназначен для работы с многомерными датчиками (предельные и амплитудные). Представляет собой набор блоков, число которых равно количеству проверяемых параметров. Для переключения с предельного режима на амплитудный служит переключатель В2. При разомкнутых контактах ЭКД лампа 6Н5П заперта отрицательным напряжением 10 В. Ток через лампу не идет, и реле 1P и 2P обесточены.
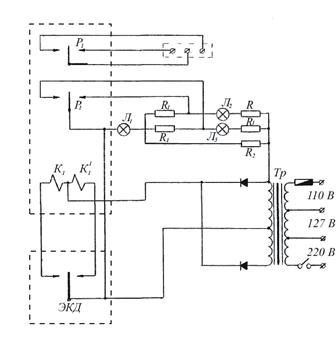
Рис. 2.10. Схема включения электроконтактного
преобразователя с "силовым контактом"
При замыкании одного из контактов ЭКД на сетку подается нулевой потенциал, лампа отпирается, реле срабатывает.

Рис. 2.11. Схема включения светофорного
блока мод. БВ-1058
При срабатывании реле происходит переключение контактов реле Р1 и Р2, которые переключают лампы Л1, Л2, Л3.
При работе с амплитудным датчиком реле 1P и 2Р ставятся на самопитание для запоминания сигнала. По окончании измерения реле обесточивается кнопкой КУ.
Блоки этого типа делятся на основные и приставные. Сборка производится с помощью разъемов. Блок основной — блок питания — рассчитан на 10 приставных блоков. Последний включает в себя усилитель и сигнальную часть.
Напряжение и величина тока на контактах ЭКД 10 В*0,02 мА. Габаритные размеры: 115*230*110 мм — основной блок; 115*230*46 мм — приставной блок.
Дата добавления: 2014-01-07 ; Просмотров: 2061 ; Нарушение авторских прав? ;
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет






