Для вывода уравнения механической характеристики воспользуемся упрощенной схемой замещения двигателя (см. рис. 3.3), где обозначено:  – фазное напряжение;
– фазное напряжение;  – фазный ток статора и приведенный фазный ток ротора соответственно;
– фазный ток статора и приведенный фазный ток ротора соответственно;  – ток намагничивания, приблизительно равный току холостого хода двигателя; x1,x2‘ – индуктивное сопротивление рассеяния обмотки статора и приведенное индуктивное сопротивление обмотки ротора; R1,R2‘ – активное сопротивление обмотки статора и приведенное сопротивление обмотки ротора; Rμ,xμ – активное и реактивное сопротивление контура намагничивания, которые определяются параметрами взаимоиндукции статорной и роторной цепей. Такую схему замещения можно построить на основании уравнений (3.6), если принять
– ток намагничивания, приблизительно равный току холостого хода двигателя; x1,x2‘ – индуктивное сопротивление рассеяния обмотки статора и приведенное индуктивное сопротивление обмотки ротора; R1,R2‘ – активное сопротивление обмотки статора и приведенное сопротивление обмотки ротора; Rμ,xμ – активное и реактивное сопротивление контура намагничивания, которые определяются параметрами взаимоиндукции статорной и роторной цепей. Такую схему замещения можно построить на основании уравнений (3.6), если принять
где C1 – модуль комплексного коэффициента, характеризующего соотношение сопротивлений статорной цепи и цепи контура намагничивания.

Рис. 3.3. Схема замещения асинхронного двигателя
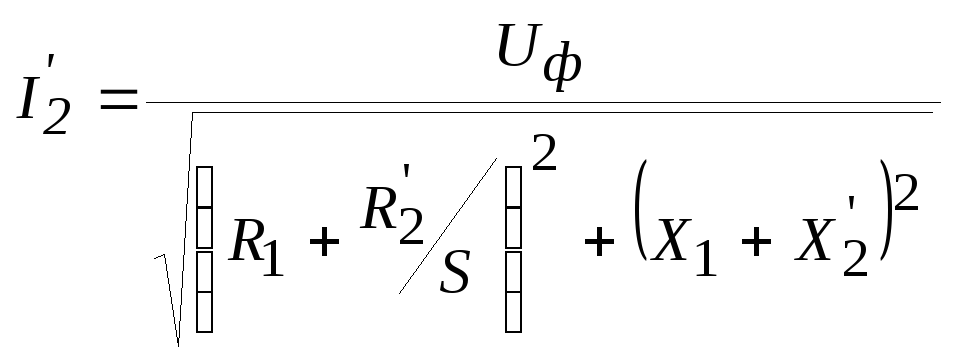
В соответствии со схемой замещения можно получить выражение для тока ротора:

Электромагнитная мощность, передаваемая через воздушный зазор, определяется выражением
где M – момент на валу двигателя. Механическая мощность на валу двигателя определяется выражением
Потери мощности в цепи ротора представим в виде
С другой стороны, потери мощности в цепи трехфазного ротора определяются выражением
Приравнивая правые части уравнений (3.2) и (3.3), выразим момент двигателя через ток ротора:
Подставляя в последнее выражение I2‘ из (3.7), получим
Выражение (3.10) является механической характеристикой асинхронного двигателя. Нетрудно заметить, что при s→0 и при s→∞ моментM→0, следовательно, функция момента имеет максимум. Известным способом, из уравнения ∂M/∂s=0 определим значение критического скольжения sк, при котором двигатель развивает максимальный (критический) момент:

Подставляя полученное значение sк в (3.10), получим выражение для критического момента

Здесь знак «+» соответствует двигательному режиму, а знак «–» – генераторному.
Если выражение (3.10) разделить на (3.12), то после преобразований получим уравнение приведенной механической характеристики

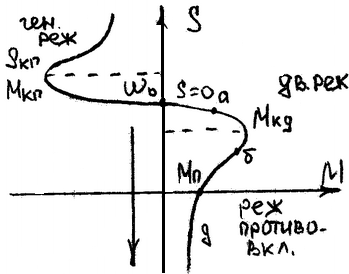
Рис. 3.4. Механическая и электромеханическая характеристики асинхронного двигателя
Механическая характеристика, соответствующая (3.13), представлена на рис. 3.4.а. Она имеет несколько характерных точек:
1. s=0,M=0 – точка холостого хода, скорость равна синхронной;
2. s=sн,M=Mн – точка номинального режима, скорость равна номинальной;
3. s=sкд,M=Mкд – точка максимального момента в двигательном режиме;
4. s=−sкг,M=Mкг – точка максимального момента в генераторном режиме;
Существуют асинхронные двигатели, у которых механическая характеристика дважды меняет знак жесткости. Тогда выделяют точки минимального момента для двигательного и генераторного режимов.
Значение пускового момента просто получить из (3.13), принимая s=1:
В ряде случаев, пренебрегая активным сопротивлением обмотки статора, при s
При изменении фазного напряжения неизменным остается критическое скольжение, критический момент уменьшается при уменьшении напряжения, т.е. жесткость механической характеристики также уменьшается, рис. 3.5.б.
При увеличении индуктивного сопротивления обмотки статора, например, путем введения в его цепь реактора (дросселя) примерно пропорционально уменьшаются и скольжение и критический момент, поэтому жесткость уменьшается, рис. 3.5.в.
При изменении частоты напряжения питания двигателя, во-первых, пропорционально изменяется скорость вращения поля статора, во-вторых, одновременно меняются и скольжение, и критический момент, рис. 3.3.г. Более подробно характеристики двигателя при изменении частоты мы рассмотрим ниже.

Рис. 3.5. Искусственные механические характеристики асинхронного двигателя
Режимы работы
Как видно из механической характеристики (рис. 3.4), асинхронный двигатель может работать в тех же режимах, что и двигатель постоянного тока. В первом и третьем квадрантах плоскости s−M обеспечивается двигательный режим работы, а во втором и четвертом – режим торможения.
Рекуперативное торможение (торможение с отдачей энергии в сеть) возникает тогда, когда скорость двигателя превысит синхронную, т.е. при переходе рабочей точки привода по механической характеристике через точку холостого хода из первого квадранта во второй или из третьего в четвертый. Электромеханические характеристики в этом режиме описываются теми же уравнениями, что и в двигательном режиме (3.7) и (3.13) и находятся в верхней части квадрантов 1 и 2 рис. 3.4.
Торможение противовключением возникает либо в случае если момент нагрузки превысит критический момент двигателя и рабочая точка привода перейдет через точку пускового момента из первого квадранта в четвертый или из третьего во второй. Либо при переключении последовательности питающих фазных напряжений, когда за счет момента инерции маховых масс привода ротор двигателя какое-то время вращается против поля. В последнем случае, как и в двигателях постоянного тока, при переходе от двигательного режима к генераторному, может возникнуть недопустимо большой ток в цепи статора и необходимо предусмотреть мероприятия по его ограничению, например, путем введения добавочного сопротивления в цепь ротора. Электромеханические характеристики в этом режиме описываются теми же уравнениями, что и в двигательном режиме.
Динамическое торможение асинхронного двигателя может быть реализовано двумя способами: с возбуждением от источника постоянного тока и с самовозбуждением. Рассмотрим каждый из них.
Дата добавления: 2016-10-23 ; просмотров: 2069 | Нарушение авторских прав
В настоящее время большое распространение получил электропривод переменного тока на базе простой по устройству и надежной в эксплуатации асинхронной машины.
Асинхронные двигатели получили большое распространение благодаря следующим своим качествам:
своей дешевизне двигателя,
достаточной высокой надежности,
относительно высокого КПД,
меньшего расхода цветных металлов на единицу мощности в 1,5-2 раза, чем для двигателя постоянного тока.
К недостаткам асинхронного двигателя следует отнести:
Квадратичная зависимость момента от напряжения, т.е. при падении напряжении в сети значительно уменьшится пусковой и максимальный момент.
 ;Хк=Х+Х’2.
;Хк=Х+Х’2.
Опасность перегрева статора особенно при повышенном напряжении,
Малый воздушный зазор, который несколько понижает надежность двигателя.
Наибольшее распространение среди асинхронных двигателей получил двигатель с короткозамкнутым ротором. Асинхронные двигатели с короткозамкнутым ротором применяются для механизмов с длительным режимом работы и не требующих регулирования скорости: в доменных цехах, используют для электропуска на электроприводе нагрузки кокса, для транспорта, в прокатных цехах, для тракторов и т.д.
Асинхронный двигатель с короткозамкнутым ротором применяют для тельферов, кран-балок, тихоходных мостовых кранов и пока широко применяют для электроприводов насосов малой мощности, транспортеров. В настоящее время наблюдается тенденция для использования двигателя с короткозамкнутым ротором в системах ПЧ-АД (преобразователя частоты в асинхронных двигателях).
Применение двигателя с фазным ротором оправдывается в следующих случаях:
Для мостовых кранов, нормальных и быстроходных, где требуется регулирование скорости на приводе моста, тележки и подъема груза.
Для маховичных приводов типа ножницы, прессы, главные приводы станков.
Для приводов, работающих с большой частотой включения, где асинхронный двигатель с короткозамкнутым ротором не проходит по нагреву или не дает требуемых динамических характеристик для торможения.
Ер=ЕрнS; ;S– скольжение.
;S– скольжение.
 ;р– число пар полюсов.
;р– число пар полюсов.
 ;n– обороты ротора.
;n– обороты ротора.
Механические характеристики асинхронного двигателя.
Механической характеристикой двигателя называется зависимость скорости вращения двигателя или скольжения от вращающего его момента и наоборот.
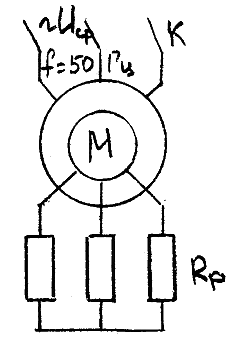
Уравнение механической характеристики асинхронного двигателя можно получить использованием упрощенной схемы замещения асинхронного двигателя, которая имеет вид:

 — суммарное активное сопротивление фазы ротора, приведенного к статору.
— суммарное активное сопротивление фазы ротора, приведенного к статору.
Х1– индуктивное сопротивление фазы обмотки статора;
Х’2– индуктивное сопротивление, приведенное к статору, индуктивное сопротивление обмотки ротора;
Х0 – индуктивное сопротивление намагничивающего контура;
R‘2– сопротивление обмотки фазы ротора приведенного к статору;
R2п– внешнее сопротивление, включенное в фазу ротора приведенного к статору.
Выражение для момента двигателя можно получить из уравнения баланса мощности асинхронного двигателя:
Р2эл– мощность электрических потерь.
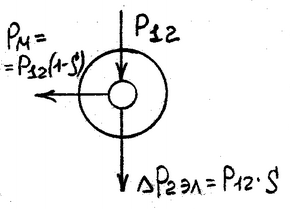 Рм=Mw; Р12=Мw0;
Рм=Mw; Р12=Мw0;
 ;
;
 ;
; ;
;
 ;
;
 ().
().
Кривая зависимости момента от скольжения имеет два максимума – один в генераторном режиме, другой в двигательном режиме или торможения противовключением.
Взяв производную от выражения () и приравняв к нулюdM/dS=0,находят критическое скольжениеSкр, при котором двигатель развивает максимальный момент:
 ;
; .
.
Подставим значение критического скольжения в формулу электромагнитного момента (), получим выражение для критического или максимального момента:
Разделив выражение электромагнитного момента на выражения Мк,получим следующую формулу:
 ();
(); .
.
Для крупных машин в виду малости активного сопротивления обмотки статора (R10) коэффициент «а» можно принять равным нулю
а0 ;R1=0
;R1=0 ;
; .
.
В электромашинах часто используют параметр (коэффициент перегрузочной способности)=Мкд/Мн.
Из номинального режима работы асинхронного двигателя подставим в формулу () Клосса значениеМ=Мн,S=Sни, принимая параметра=0, получим:
1. От w0до точки а – рабочий участок, определяется скольжениемS 0,350.4Sk,механическая характеристика линейная
 ;SSk;
;SSk; 
2. Sкд– точка критического скольжения, изменяется в пределах 0,080,3.
Критический момент изменяется в пределах 1,63,4
3. Точка холостого хода М=0, скольжение равно нулю,w0.
 ;
; ;
;
Точка критического скольжения в генераторном режиме при рекуперации энергии в сеть.
 ;МкгМкд.
;МкгМкд.
| Название: Расчет механических характеристик асинхронных двигателей с короткозамкнутым ротором Раздел: Рефераты по физике Тип: курсовая работа Добавлен 13:03:13 27 марта 2010 Похожие работы Просмотров: 2656 Комментариев: 13 Оценило: 2 человек Средний балл: 5 Оценка: неизвестно Скачать |
||||||||||
| Мощность, кВт | Частота вращения, об/мин | Номинальный ток при 380 В, А | Момент, Н·м | Пусковой ток при 380 В, А | Коэффициент мощности | Массогабаритные показатели, кг·м 2 | КПД, % | |||
| максимальный | пусковой | |||||||||
| Pн | nн | Iн | Мmax | Мп | Iп | сosн φ | GD 2 | η | ||
| Синхронная частота вращения n0=1000 об/мин | ||||||||||
| 12 | МАП 221-6 | 4,0 | 890 | 11,8 | 150 | 130 | 46 | 0,78 | 0,19 | 83 |
 и
и 







 и линейному току
и линейному току  статора, номинальным значениям мощности
статора, номинальным значениям мощности  , коэффициента мощности
, коэффициента мощности  , и КПД
, и КПД  , кратностям максимального
, кратностям максимального  и пускового тока
и пускового тока  (приложение – таблица
(приложение – таблица  )
)1.3 Расчеты параметров обмоток статора и ротора
1) Критическое скольжение двигателя.
Одной из важных точек механической характеристики, представляющей интерес при анализе работы и выборе АД, является точка, где момент, развиваемый двигателем, достигает наибольшего значения. Эта точка имеет координаты nкр,sкр,Mmax (рис.1.) Значение критического скольжения sкр, при котором двигатель развивает максимальный (критический) момент Mmax определим по формуле.
 , (1.1)
, (1.1)

 — кратность критического (максимального) момента;
— кратность критического (максимального) момента;
Номинальный момент асинхронного двигателя рассчитывается по выражению:
 ,
,
где  — номинальное значение мощности
— номинальное значение мощности  ,
,
 — номинальное значение угловой скорости вращения
— номинальное значение угловой скорости вращения  .
.
 ,
,
 ,
,

Величину  , где
, где  σ1 — коэффициент первичного рассеяния, принимают приближенно равной 1 для двигателей нормального исполнения.
σ1 — коэффициент первичного рассеяния, принимают приближенно равной 1 для двигателей нормального исполнения.
Подставим полученные значения в формулу (1).



 1,686
1,686
Поскольку  Принимаем
Принимаем 
2) Ток намагничивания двигателя в номинальном режиме.
 (1.2)
(1.2)
 — по условию sin²φ+cos²φ=1 отсюда sin²φ =1- cos²φ; sinφ =√1- cos²φ;
— по условию sin²φ+cos²φ=1 отсюда sin²φ =1- cos²φ; sinφ =√1- cos²φ;
sinφ =√(1- 0,78²)=0,62578


 (А)
(А)
3) Относительное значение номинального тока ротора.
 (1.3)
(1.3)


 0,784703
0,784703
отсюда — приведенное значение номинального тока ротора
— приведенное значение номинального тока ротора
4) Пусковой ток ротора.
 (1.4)
(1.4)
 — кратность пускового тока двигателя.
— кратность пускового тока двигателя. 


5) Приведенное активное сопротивление ротора.
 , (1.5)
, (1.5)
 — приведенное значение номинального тока ротора из выражения (3).
— приведенное значение номинального тока ротора из выражения (3).
 — скорость вращения идеального холостого хода.
— скорость вращения идеального холостого хода.
 -число пар полюсов электродвигателя, отсюда
-число пар полюсов электродвигателя, отсюда 
 -частота питающего напряжения=50Гц
-частота питающего напряжения=50Гц



6) Полное сопротивление короткого замыкания.
 ,
,
 — фазное напряжение асинхронного двигателя. (1.6)
— фазное напряжение асинхронного двигателя. (1.6)



7) Коэффициент мощности при пуске асинхронного двигателя.
 , (1.7)
, (1.7)
 — кратность пускового момента двигателя;
— кратность пускового момента двигателя; 
 -номинальное значение КПД двигателя (по усл);
-номинальное значение КПД двигателя (по усл);
 — отношение потерь в меди статора к суммарным потерям в номинальном режиме.
— отношение потерь в меди статора к суммарным потерям в номинальном режиме.



 0,72
0,72
8) Коэффициент первичного рассеяния
 .
. 
 1,069 (1.8)
1,069 (1.8)
9) Активное сопротивление обмотки статора
 (1.9)
(1.9)
 — из пункта 5; Zк- из пункта 6; cosφ из пункта 7;
— из пункта 5; Zк- из пункта 6; cosφ из пункта 7;  — из пункта 8.
— из пункта 8. 
 1,943 (Ом)
1,943 (Ом)
10) Индуктивное сопротивление обмотки статора двигателя, определяемое по номинальному режиму.
 (1.10)
(1.10)


 0,726 (Ом)
0,726 (Ом)
11) Индуктивное сопротивление двигателя, определяемое по пусковому режиму.
 (1.11)
(1.11)
 отсюда
отсюда 



12) Приведенное индуктивное сопротивление обмотки ротора
 (1.12)
(1.12)

2. Расчет механической характеристики асинхронного двигателя в двигательном режиме






