38) Механическая характеристика асинхронного двигателя.
Механическая характеристика. Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая
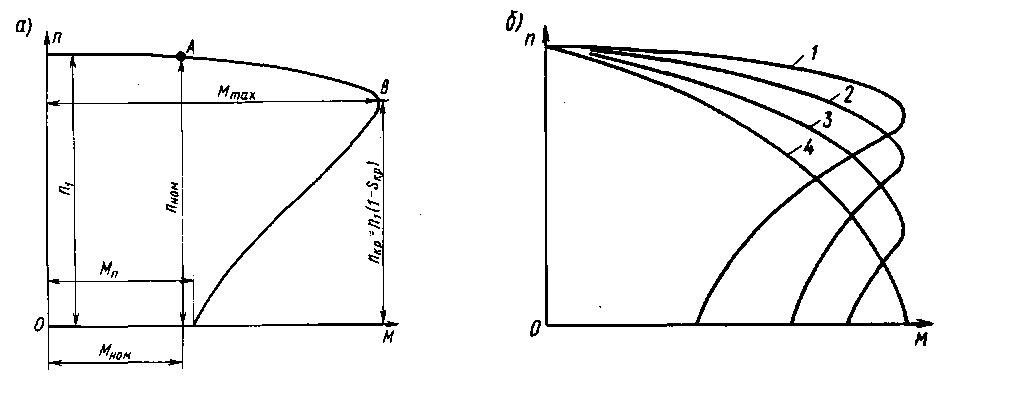
Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата
на рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.
Наибольший вращающий момент Mmax двигатель развивает при некоторое скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства.
Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В). Если нагрузочный момент Мвн превысит момент Mmax, то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5—7 раз больше номинального, и они могут сгореть.
При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками. При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax.
В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых рабочей и пусковой клетками. Поэтому характеристику 1 (рис. 263) можно получить путем суммирования характеристик 2 и 3, создаваемых этими клетками. Пусковой момент Мп такого двигателя значительно больше, чем момент М’п обычного короткозамкнутого двигателя. Механическая характеристика двигателя с глубокими пазами такая же, как и у двигателя с двойной беличьей клеткой.
НА ВСЯКИЙ СЛУЧАЙ РАБОЧУЮ ХАРАКТЕРИСТИКУ .
Рабочие характеристики. Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М2, тока статора I1 коэффициента полезного действия ? и cos?1, от полезной мощности Р2 = Рmx при номинальных значениях напряжения U1 и частоты f1 (рис. 264). Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения.
Ток статора I1, возрастает с увеличением отдаваемой мощности, но при Р2 = 0 имеется некоторый ток холостого хода I0. К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки.
Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75—0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cos?1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7—0,9. Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей.
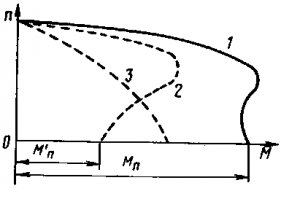 Рис. 263. Механическая характеристика асинхронного двигателя с повышенным пусковым моментом (с двойной беличьей клеткой)
Рис. 263. Механическая характеристика асинхронного двигателя с повышенным пусковым моментом (с двойной беличьей клеткой)
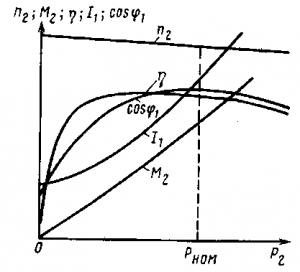 Рис. 264. Рабочие характеристики асинхронного двигателя
Рис. 264. Рабочие характеристики асинхронного двигателя
При нагрузках 25—50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5—0,75).
При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25—0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках.
Работа при пониженном напряжении и обрыве одной из фаз. Понижение напряжения сети не оказывает существенного влияния на частоту вращения ротора асинхронного двигателя. Однако в этом случае сильно уменьшается наибольший вращающий момент, который может развить асинхронный двигатель (при понижении напряжения на 30% он уменьшается примерно в 2 раза). Поэтому при значительном падении напряжения двигатель может остановиться, а при низком напряжении — не включиться в работу.
На э. п. с. переменного тока при уменьшении напряжения в контактной сети соответственно уменьшается и напряжение в трехфазной сети, от которой питаются асинхронные двигатели, приводящие во вращение вспомогательные машины (вентиляторы, компрессоры, насосы). Для того чтобы обеспечить нормальную работу асинхронных двигателей при пониженном напряжении (они должны нормально работать при уменьшении напряжения до 0,75Uном), мощность всех двигателей вспомогательных машин на э. п. с. берется примерно в 1,5—1,6 раза большей, чем это необходимо для привода их при номинальном напряжении. Такой запас по мощности необходим также из-за некоторой несимметрии фазных напряжений, так как на э. п. с. асинхронные двигатели питаются не от трехфазного генератора, а от расщепителя фаз. При несимметрии напряжений фазные токи двигателя будут неодинаковы и сдвиг между ними по фазе не будет равен 120°. В результате по одной из фаз будет протекать больший ток, вызывающий увеличенный нагрев обмоток данной фазы. Это заставляет ограничивать нагрузку двигателя по сравнению с работой его при симметричном напряжении. Кроме того, при несимметрии напряжений возникает не круговое, а эллиптическое вращающееся магнитное поле и несколько изменяется форма механической характеристики двигателя. При этом уменьшаются его наибольший и пусковой моменты. Несимметрию напряжений характеризуют коэффициентом несимметрии, который равен среднему относительному (в процентах) отклонению напряжений в отдельных фазах от среднего (симметричного) напряжения. Систему трехфазных напряжений принято считать практически симметричной, если этот коэффициент меньше 5 %.
При обрыве одной из фаз двигатель продолжает работать, но по неповрежденным фазам будут протекать повышенные токи, вызывающие увеличенный нагрев обмоток; такой режим не должен допускаться. Пуск двигателя с оборванной фазой невозможен, так как при этом не создается вращающееся магнитное поле, вследствие чего ротор двигателя не будет вращаться.
Использование асинхронных двигателей для привода вспомогательных машин э. п. с. обеспечивает значительные преимущества по сравнению с двигателями постоянного тока. При уменьшении напряжения в контактной сети частота вращения асинхронных двигателей, а следовательно, и подача компрессоров, вентиляторов, насосов практически не изменяются. В двигателях же постоянного тока частота вращения пропорциональна питающему напряжению, поэтому подача этих машин существенно уменьшается.
Асинхронные двигатели (АД) – самый распространенный вид двигателей, т.к. они более просты и надежны в эксплуатации, при равной мощности имеют меньшую массу, габариты и стоимость в сравнении с ДПТ. Схемы включения АД приведены на рис. 2.14.
До недавнего времени АД с короткозамкнутым ротором применялись в нерегулируемых электроприводах. Однако с появлением тиристорных преобразователей частоты (ТПЧ) напряжения, питающего статорные обмотки АД, двигатели с короткозамкнутым ротором начали использоваться в регулируемых электроприводах. В настоящее время в преобразователях частоты применяются силовые транзисторы и программируемые контроллеры. Способ регулирования скорости получил название импульсного и его совершенствование является важнейшим направлением в развитии электропривода.
Рис. 2.14. а) схема включения АД с короткозамкнутым ротором;
б) схема включения АД с фазным ротором.
Уравнение для механической характеристики АД может быть получено на основании схемы замещения АД. Если в этой схеме пренебречь активным сопротивлением статора, то выражение для механической характеристики будет иметь вид:
 ,
,
где  ;
;  .
.
Здесь Мк – критический момент; Sк — соответствующее ему критическое скольжение; Uф – действующее значение фазного напряжения сети; ω0=2πf/p – угловая скорость вращающегося магнитного поля АД (синхронная скорость); f – частота питающего напряжения; p – число пар полюсов АД; хк – индуктивное фазное сопротивление короткого замыкания (определяется из схемы замещения); S=(ω0-ω)/ω0 – скольжение (скорость ротора относительно скорости вращающегося поля); R2 1 – суммарное активное сопротивление фазы ротора.
Механическая характеристика АД с короткозамкнутым ротором приведена на рис. 2.15.
Рис. 2.15. Механическая характеристика АД с короткозамкнутым ротором.
На ней можно выделить три характерные точки. Координаты первой точки (S=0; ω=ω0; М=0). Она соответствует режиму идеального холостого хода, когда скорость ротора равна скорости вращающегося магнитного поля. Координаты второй точки (S=Sк; М=Мк). Двигатель работает с максимальным моментом. При Мс>Мк ротор двигателя будет принудительно остановлен, что для двигателя является режимом короткого замыкания. Поэтому вращающий момент двигателя в этой точке и называется критическим Мк. Координаты третьей точки (S=1; ω=0; М=Мп). В этой точке двигатель работает в режиме пуска: скорость ротора ω=0 и на неподвижный ротор действует пусковой момент Мп. Участок механической характеристики, расположенный между первой и второй характерными точками, называется рабочим участком. На нем двигатель работает в установившемся режиме. У АД с короткозамкнутым ротором при выполнении условий U=Uн и f=fн механическая характеристика называется естественной. В этом случае на рабочем участке характеристики расположена точка, соответствующая номинальному режиму работы двигателя и имеющая координаты (Sн; ωн; Мн).
Электромеханическая характеристика АД ω=f(Iф) , которая на рис.2.15 изображена штриховой линией, в отличие от электромеханической характеристики ДПТ, совпадает с механической характеристикой только на ее рабочем участке. Это объясняется тем, во время пуска из-за изменяющейся частоты э.д.с. в обмотке ротора Е2 изменяется частота тока и соотношение индуктивного и активного сопротивлений обмотки: в начале пуска частота тока большая и индуктивное сопротивление больше активного; с увеличением скорости вращения ротора ω частота тока ротора, а значит и индуктивное сопротивление его обмотки, уменьшается. Поэтому пусковой ток АД в режиме прямого пуска в 5÷7 раз превышает номинальное значение Iфн, а пусковой момент Мп равен номинальному Мн. В отличии от ДПТ, где при пуске необходимо ограничивать пусковой ток и пусковой момент, при пуске АД пусковой ток необходимо ограничивать, а пусковой момент увеличивать. Последнее обстоятельство наиболее важно, поскольку ДПТ с независимым возбуждением запускается при Мс
У АД с фазным ротором увеличение МП обеспечивается за счет изменения его механической характеристики. Если сопротивление RП, включенное в цепь протекания тока ротора, равно нулю – двигатель работает на естественной характеристике и МП=МН. При RП>0 увеличивается суммарное активное сопротивление фазы ротора R2 1 . Критическое же скольжение Sк по мере увеличения R2 1 тоже увеличивается. Вследствие этого у АД с фазным ротором введение RП в цепь протекания тока ротора приводит к смещению МК в сторону больших скольжений. При SК=1 МП=МК. Механические характеристики АД с фазным ротором при RП>0 называются искусственными или реостатными. Они приведены на рис. 2.16.
 |
Рис. 2.16. Механические характеристики АД с фазным ротором.
Асинхронный двигатель с короткозамкнутым ротором запустится при Мп>Мс и будет работать в точке А (см. рис. 2.15). После этого момент сопротивления Мс можно увеличивать до МК. АД, как и двигатели постоянного тока, при увеличении Мс будет автоматически, без вмешательства извне, снижать скорость ω и увеличивать вращающий момент М до тех пор, пока М и Мс не сравняются по величине, т.е. из установившегося режима с большей скоростью переходить в установившийся режим с меньшей скоростью. При уменьшении Мс будет наблюдаться обратное – двигатель из установившегося режима с меньшей скоростью будет автоматически переходить в установившийся режим с большей скоростью. Рабочий участок механической характеристики АД аналогичен механической характеристике ДПТ с независимым возбуждением – прямая линия, наклоненная к оси абсцисс.
Такими свойствами АД обладает благодаря э.д.с. Е2, которая наводится вращающимся магнитным полем статора в обмотке ротора. При Мс>М динамический момент Мд
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: Для студентов недели бывают четные, нечетные и зачетные. 9493 —  | 7459 —
| 7459 —  или читать все.
или читать все.
1. Виды электродвигателей
Наибольшее распространение имеет трехфазный асинхронный электродвигатель. Электродвигатели постоянного тока и синхронные применяются редко.
Большинство электрифицированных машин нуждаются в приводе мощностью от 0,1 до 10 кВт, значительно меньшая часть — в приводе мощностью в несколько десятков кВт. Как правило, для привода рабочих машин используются короткозамкнутые трехфазные электродвигатели. По сравнению с фазным такой электродвигатель имеет более простую конструкцию, меньшую стоимость, большую надежность в эксплуатации и простоту в обслуживании, несколько более высокие эксплутационные показатели (коэффициент мощности и коэффициент полезного действия), а при автоматическом управлении требует простой аппаратуры. Недостаток короткозамкнутых электродвигателей — относительно большой пусковой ток. При соизмеримости мощностей трансформаторной подстанции и электродвигателя его пуск сопровождается заметным снижением напряжения сети, что усложняет как пуск самого двигателя, так и работу соседних токоприемников.
Наряду с трехфазными асинхронными короткозамкнутыми электродвигателями основного исполнения применяются также отдельные модификации этих двигателей: с повышенным скольжением, многоскоростные, с фазным ротором, с массивным ротором и т. д. Электродвигатели с фазным ротором применяют и в тех случаях, когда мощность питающей сети недостаточна для пуска двигателя с короткозамкнутым ротором.
Механические характеристики асинхронных электродвигателей с короткозамкнутым ротором в значительной мере зависят от формы и размеров пазов ротора, а также от способа выполнения роторной обмотки. По этим признакам

Рис. 1. Кривые моментов M = f(S) асинхронных электродвигателей
различают электродвигатели с нормальным ротором (нормальная беличья клетка), с глубоким пазом и с двумя клетками на роторе. Конструкция ротора короткозамкнутых асинхронных электродвигателей общего назначения мощностью свыше 500 Вт предопределяет явление вытеснения тока в обмотке, эквивалентно увеличению ее активного сопротивления. Поэтому, а также вследствие насыщения магнитных путей потоков рассеивания такие электродвигатели (в первую очередь обмотки ротора) обладают переменными параметрами и аналитические выражения их механических характеристик усложняются. Увеличение активного сопротивления ротора в период пуска вызывает увеличение начального пускового момента при некотором снижении силы начального пускового тока (рис. 1).
2. Основные характеристики электродвигателей
Номинальный режим электродвигателя соответствует данным, указанным на его щитке (паспорте). В этом режиме двигатель должен удовлетворять требованиям, установленным ГОСТом.
Существует восемь различных режимов работы, из них основными можно считать:
· продолжительный номинальный режим;
· кратковременный номинальный режим с длительностью рабочего периода 10, 30 и 90 мин;
· повторно-кратковременный номинальный режим с продолжительностью включения (ПВ) 15, 25, 40, 60%, с продолжительностью одного цикла не более 10 мин.
Номинальной мощностью Рн электродвигателя называется указанная на щитке полезная механическая мощность на валу при номинальном режиме работы. Номинальная мощность выражается в Вт или кВт.
Номинальная частота вращения nн вала электродвигателя называется указанное на щитке число оборотов в минуту, соответствующее номинальному режиму.
Номинальный момент вращения — момент, развиваемый двигателем на валу при номинальной мощности и номинальной частоте вращения:

Мн — номинальный момент вращения, Н·м (1 кгс·м = 9,81 Н·м ≈ 10 Н·м);
Рн — номинальная мощность, кВт;
nн — номинальная частота вращения, об/мин.
Номинальный к.п.д. hн электродвигателя — отношение его номинальной
мощности к мощности, потребляемой им из сети при номинальном напряжении:

Рн — номинальная мощность, кВт;
Uн — номинальное (линейное) напряжение, В;
Iн — номинальная сила тока, А;
cosφн — номинальный коэффициент мощности.
Номинальной силой тока электродвигателя называется сила тока, соответствующая номинальному режиму. Действительное значение силы тока при номинальном режиме может отличаться от указанного на щитке электродвигателя в пределах установленных допусков для к.п.д. и коэффициента мощности.
Максимальный вращающий момент электродвигателя — наибольший вращающий момент, развиваемый при рабочем соединении обмоток и постепенном повышении момента сопротивления на валу сверх номинального при условии, что напряжение на зажимах двигателя и частота переменного тока остаются неизменными и равными номинальным значениям.
Начальный пусковой вращающий момент электродвигателя — момент вращения его при неподвижном роторе, номинальных значениях напряжения и частоты переменного тока и рабочем соединении обмоток.
Минимальным вращающим моментом электродвигателя в процессе пуска называется наименьший вращающий момент, развиваемый двигателем при рабочем соединении обмоток и частоте вращения в пределах от нуля до значения, соответствующего максимальному вращающему моменту (напряжение на зажимах двигателя и частота переменного тока должны оставаться неизменными и равными их номинальным значениям).
Номинальная частота вращения вала электродвигателя является следующим за мощностью параметром, от которого в значительной мере зависят конструктивное оформление, габариты, стоимость и экономичность работы электропривода. Наиболее приемлемыми в диапазоне мощностей от 0,6 до 100 кВт являются частоты вращения 3000, 1500 и 1000 об/мин (синхронные). Электродвигатели с частотой вращения 750 об/мин (восьмиполюсные) малых мощностей имеют низкие энергетические показатели. При одинаковой мощности электродвигатели с более высокой частотой вращения имеют более высокие значения к.п.д. и cosφ, а также меньшие размеры и массу, что определяет их меньшую стоимость.
Сила тока холостого хода I0 в значительной мере определяется силой намагничивающего тока I0Р. приближенно можно считать I0 = I0P . Для машин
основного исполнения относительное значение силы тока холостого хода
I0 = (0,2—0,6)Iн (оно тем больше, чем меньше номинальная частота вращения и мощность электродвигателя). Зависимость тока холостого хода от частоты вращения электродвигателя приведена в таблице 2.1.
Таблица 2.1. Токи холостого хода для двигателей основного исполнения
Среднее значение токов холостого хода
(в долях от силы номинального тока) при синхронной частоте вращения, об/мин






