Содержание
Компенсация реактивной мощности — целенаправленное воздействие на баланс реактивной мощности в узле электроэнергетической системы с целью регулирования напряжения, а в распределительных сетях и с целью снижения потерь электроэнергии. Компенсация осуществляется с использованием компенсирующих устройств. Для поддержания требуемых уровней напряжения в узлах электрической сети потребление реактивной мощности должно обеспечиваться требуемой генерируемой мощностью с учетом необходимого резерва. Генерируемая реактивная мощность складывается из реактивной мощности, вырабатываемой генераторами электростанций и реактивной мощности компенсирующих устройств, размещенных в электрической сети и в электроустановках потребителей электрической энергии.
Компенсация реактивной мощности особенно актуальна для промышленных предприятий, основными электроприёмниками которых являются асинхронные двигатели, в результате чего коэффициент мощности без принятия мер по компенсации составляет 0,7 — 0,75. Мероприятия по компенсации реактивной мощности на предприятии позволяют:
· уменьшить нагрузку на трансформаторы, увеличить срок их службы;
· уменьшить нагрузку на провода, кабели, использовать их меньшего сечения;
· улучшить качество электроэнергии у электроприемников (за счёт уменьшения искажения формы напряжения);
· уменьшить нагрузку на коммутационную аппаратуру за счет снижения токов в цепях;
· избежать штрафов за снижение качества электроэнергии пониженным коэффициентом мощности;
· снизить расходы на электроэнергию.
Значительную часть электрооборудования любого предприятия составляют устройства, обязательным условием нормальной работы которых является создание в них магнитных полей, а именно: трансформаторы, асинхронные двигатели, индукционные печи и прочие
фазовый сдвиг между током и напряжением (ток «отстает» от напряжения на фазовый угол).
Отставание тока по фазе от напряжения в индуктивных элементах обуславливает интервалы времени (см. рис.), когда напряжение и ток имеют противоположные знаки: напряжение положительно, а ток отрицателен и наоборот. В эти моменты мощность не потребляется нагрузкой, а подается обратно по сети в сторону генератора. При этом электроэнергия, запасаемая в каждом индуктивном элементе, распространяется по сети, не рассеиваясь в активных элементах, а совершая колебательные движения (от нагрузки к генератору и обратно). Соответствующую мощность называют реактивной.
Полная мощность складывается из активной мощности, совершающей полезную работу, и реактивной мощности, расходуемой на создание магнитных полей и создающей дополнительную нагрузку на силовые линии питания. Соотношение между полной и активной мощностью, выраженное через косинус угла между их векторами, называется коэффициентом (фактором) мощности.
cosφ = P/S. P-активная мощность; S-полная мощность; Q-реактивная мощность. 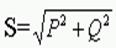 |
 |
Разные знаки у тока и напряжения на период фазового сдвига, как следствие, приводят к снижению энергии электромагнитных полей индуктивностей, которая восполняется из сети. Для большинства промышленных потребителей это означает следующее: по сетям между источником электроэнергии и потребителем кроме совершающей полезную работу активной энергии протекает и реактивная энергия, не совершающая полезной работы и направленная только на создание магнитных полей в индуктивной нагрузке. Однако, протекая по кабелям и обмоткам трансформаторов, реактивный ток снижает в пределах их пропускной способности долю протекаемого по ним активного тока, вызывая при этом значительные дополнительные потери в проводниках на нагрев — то есть активные потери. Из этого следует, что согласно современным правилам расчета за электроэнергию, потребитель вынужден как минимум дважды платить за одни и те же непроизводительные затраты. Один раз — непосредственно за потребленную из сети реактивную энергию (по счетчику реактивной энергии) и второй раз — за нее же, но косвенно, оплачивая активные потери от протекания реактивной энергии, учитываемые счетчиком активной энергии. Изменить данную ситуацию можно путем размещения источника реактивной энергии непосредственно у потребителей — это дает возможность разгрузить сети от реактивного тока и практически исключить все вышеописанные недостатки — то есть «скомпенсировать» индуктивную реактивную мощность. Таким источником служат другие фазосдвигающие элементы — конденсаторы. В противоположность индуктивности, конденсаторы стремятся сохранять неизменным напряжение на своих зажимах, то есть для них ток «опережает» напряжение. Поскольку величина потребляемой электроэнергии на любом предприятии никогда не является постоянной и может меняться в существенном диапазоне за достаточно малый промежуток времени, — то, соответственно, может меняться и соотношение активной потребляемой энергии к полной, то есть cosφ. Причем, чем меньше активная нагрузка какого-либо индуктивного потребителя (асинхронного двигателя, трансформатора), тем ниже cosφ. Из этого следует, что для компенсации реактивной мощности необходим набор оборудования, обеспечивающий адекватное регулирование cosφ в зависимости от изменяющихся условий работы оборудования — то есть установка компенсаторов реактивной мощности (УКРМ).
Передача мощности по линии
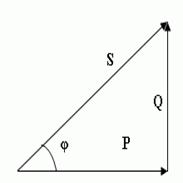
Рассмотрим передачу электрической мощности переменного тока по линии электропередач. В согласованном состоянии можно показать, что линия представляет собой в основном индукивное сопротивление (рис.1).
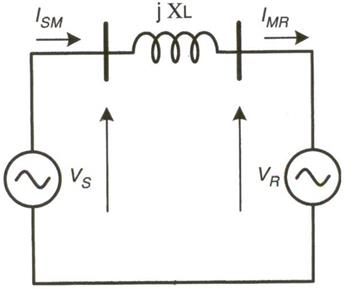
Рис.1. Упрощенная структура линии электропередачи.
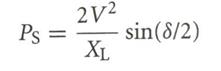
Если сдвиг фаз между генераторами (источниками) напряжения равен δ, то передаваемая активная мощность может быть записана в виде

Рассмотрим идеальный параллельный компенсатор, представленный на рис.2. Он представляет собой источник ЭДС VM с амплитудой V и фазой отстающей от Vs на δ/2 и опережающей на такой же угол генератор VR.
Рис.2. Упрощенная структура линии электропередачи с параллельным компенсатором.
Передаваемая мощность с учетом компенсатора может быть записана в виде
Векторная диаграмма работы показана на рис.3.

Рис.3. Векторная диаграмма линии электропередачи с параллельным компенсатором.
 |
Принимая во внимание факт получаем эффект увеличения пропускной способности активной мощности линии.
Идеальный последовательный компенсатор представленный на рис.4. Он представляет собой источник ЭДС с амплитудой VС.
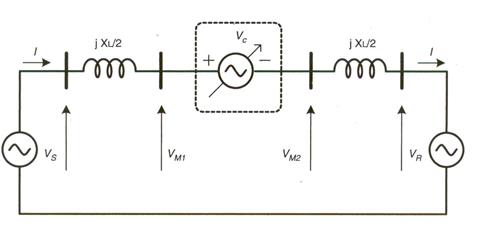
Рис.4. Упрощенная структура линии электропередачи с последовательным компенсатором.
Для идеального последовательного компенсатора справедливы следующие соотношения:
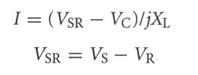


Векторная диаграмма работы показана на рис.5.
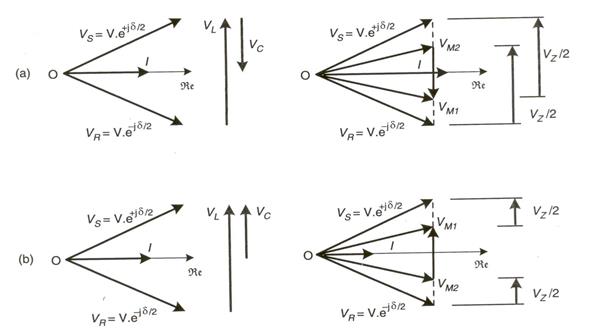
Рис.5. Векторная диаграмма линии электропередачи с последовательным компенсатором.
Реальный последовательный компенсатор
Идеальный последовательный компенсатор должен устанавливаться в середине линии электропередачи. На практике это условие выполнить достаточно проблематично. Поэтому реальный последовательный компенсатор устанавливается с одной стороны линии передачи (рис.6).

Рис.6. Структура линии электропередачи с реальным последовательным компенсатором.
В этом случае вид векторной диаграммы изменяется (рис.7).
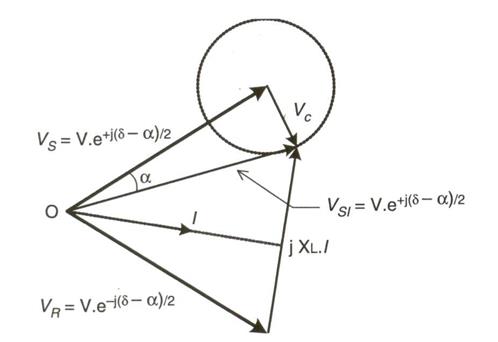
Рис.7. Векторная диаграмма линии с реальным последовательным компенсатором.
И соотношение для активной мощности можно записать в следующем виде:

Исходя из вышеизложенного можно представить диаграмму пропускной способности линии для разных вариантов компенсации (рис.8).

Рис.8. Пропускная способность линии для разных вариантов компенсации.
В общем случае наилучшей компенсацией обладает схема с последовательным включением; устройства со сдвигом фазы наилучшим образом подходят для связи двух систем с нестационарным поведением фазового угла – они не улучшают пропускную способность в явном виде, но зато стабилизируют ее в широком диапазоне разбалланса. Параллельный компенсатор в нормальной области углов (до 30°) не так сильно увеличивает пропускную способность, однако существенно улучшает динамическую устойчивость линии.
На рис. 9 представлены характеристики пропускной способности линии в зависимости от фазового угла.
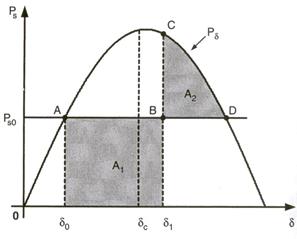
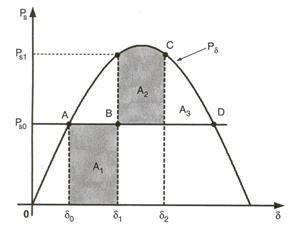
Рис.9. Пропускная способность линии в разных условиях устойчивости.
Предположим, что на линии случается короткое замыкание с отключением нагрузки. Турбина электростанции, которая вращает генератор не может изменить свою энергию вращения немедленно, а следовательно генератор, нагрузка которого снизилась начнет увеличивать свою угловую скорость под действием турбины. Вследствие этого за время аварийного процесса фазовый угол увеличится от величины δ0 до величины δ1. Если в этот момент произойдет рестарт линии, то передаваемая линией мощность окажется равной P1 > P0, и начнется уменьшение скорости вращения генератора. При этом фазовый угол увеличится до значения δ2.
Площадь A1 соответствует энергии, которая разгоняет турбину, а A2 – тормозит. Для того, чтобы система пришла к своему первоначальному состоянию необходимо, чтобы A1 = A2. Таким образом, если в системе A1 Vs ток будет вытекать из реактора — реактивная мощность генерируется.
При сравнении выходных характеристик СТК и СТАТКОМ необходимо обратить внимание, что СТАТКОМ обеспечивает полную величину выходного тока практически во всем диапазоне напряжений, в то время как в СТК ток принципиально зависит от напряжения (рис.20).
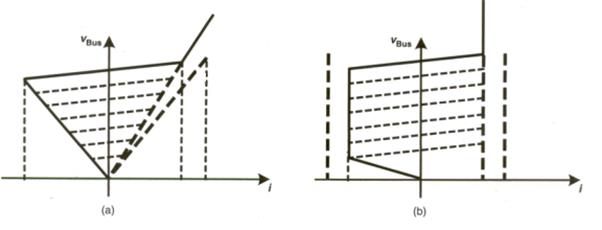
Рис.20. Выходные характеристики СТК (a) и СТАТКОМа (b).
Также СТАТКОМ обеспечивает лучшее быстродействие вследствие использования полностью управляемых приборов. Вместе с более широким диапазоном мощностей этим обеспечивается лучшая динамическая устойчивость линии при использовании СТАТКОМа.
Статический синхронный последовательный компенсатор
На базе полностью управляемых приборов также возможно построение статического синхронного последовательного компенсатора, который работает по принципу вольтодобавки в линии электропередачи (рис.21).

Рис.21. Статический синхронный последовательный компенсатор.
Универсальный контроллер управления мощностью
Универсальный контроллер управления мощностью (рис.22) может быть построен на основе СТАТКОМа и статического синхронного последовательного компенсатора.

Рис.22. Универсальный контроллер управления мощностью.
Диаграмма работы компенсатора представлена на рис.23. Напряжение вольтодобавки Vc представлено окружностью c центром на конце вектора Vs. Таким образом контроллер может управлять не только реактивной, но также и активной мощностью.
Рис.23. Векторная диаграмма универсального контроллера.
Необходимо отметить и еще один аспект построения линий электропередач с использованием статических устройств. До использования статических преобразователей функции компенсаторов выполняли мощные синхронные двигатели, работающие в режиме синхронных компенсаторов. Конечно, эти машины обладали рядом существенных недостатков, но одно их качество надо отметить: они обладали большим запасом энергии вращения и в моменты коротких замыканий подпитывали линии, не давая им выключиться из работы.
Современные статические устройства имеют запасенную энергию в виде тока в реакторах и напряжения на конденсаторах. По сравнению с энергией синхронных компенсаторов эта энергия ничтожно мала, и поэтому проектировщикам приходится применять различные другие механизмы накопления энергии. Одним из таких решений является применение накопителей на суперконденсаторах. Другим решением является использование механического накопителя (рис.24).
В отличие от синхронного компенсатора современные механические накопители используют асинхронные электрические машины. Эти машины более технологичны, обладают меньшей стоимостью и безусловно более предпочтительны в эксплуатации.
Рис.24. Механический накопитель энергии.
Однако применение асинхронных электрических машин требует дополнительных затрат на статический преобразователь – что также обуславливает применение инструментов силовой электроники .
Определение
Полная электрическая мощность состоит из активной и реактивной энергии:
S=Q+P
Здесь Q – реактивная, P – активная.
Реактивная мощность возникает в магнитных и электрических полях, которые характерны для индуктивной и емкостной нагрузки при работе в цепях переменного тока. При работе активной нагрузки, фазы напряжения и тока одинаковы и совпадают. При подключении индуктивной нагрузки – напряжение отстает от тока, а при емкостной – опережает.

Косинус угла сдвига между этими фазами называется коэффициентом мощности.
cosФ=P/S
P=S*cosФ
Косинус угла всегда меньше единицы, соответственно активная мощность всегда меньше полной. Реактивный ток протекает в обратном направлении относительно активного и препятствует его прохождению. Так как по проводам протекает ток полной нагрузки:
S=U*I
То и при разработке проектов линий электропередач нужно учитывать потребление активной и реактивной энергии. Если последней будет слишком много, то придется увеличивать сечение линий, что ведет к дополнительным затратам. Поэтому с ней борются. Компенсация реактивной мощности снижает нагрузку на сети и экономит электроэнергию промышленных предприятий.
Где важно учитывать косинус Фи
Давайте разберемся, где и когда нужна компенсация реактивной мощности. Для этого нужно проанализировать её источники.

Примером основной реактивной нагрузки являются:
- электрические двигатели, коллекторные и асинхронные, особенно если в рабочем режиме его нагрузка мала для конкретного двигателя;
- электромеханические исполнительные механизмы (соленоиды, клапана, электромагниты);
- электромагнитные коммутационные приборы;
- трансформаторы, особенно на холостом ходу.
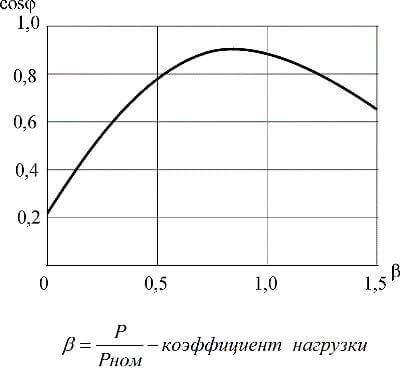
На графике изображено изменение cosФ электродвигателя при изменении нагрузки.
Основу электрохозяйства большинства промышленных предприятий составляет электропривод. Отсюда и высокое потребление реактивной мощности. Частные потребители не оплачивают её потребление, а предприятия оплачивают. Это вызывает дополнительные затраты, от 10 до 30% и более от общей суммы счета за электроэнергию.
Виды компенсаторов и их принцип действия
В целях снижения реактива используют устройства компенсации реактивной мощности, т.н. УКРМ. В качестве компенсатора мощности на практике используют чаще всего:
Так как в течении времени количество реактивной мощности может изменяться, значит и компенсаторы могут быть:
- Нерегулируемые – обычно конденсаторная батарея без возможности отключения отдельных конденсаторов для изменения емкости.
- Автоматические – ступени компенсации изменяются в зависимости от состояния сети.
- Динамические – компенсируют, когда нагрузка быстро изменяет свой характер.
В схеме используется, в зависимости от количества реактивной энергии от одного до целой батареи конденсаторов, которые можно вводить и выводить из цепи. Тогда и управление может быть:
- ручным (автоматические выключатели);
- полуавтоматическим (кнопочные посты с контакторами);
- неуправляемыми, тогда они подсоединены напрямую к нагрузке, включаются и отключаются вместе с ней.
Конденсаторные батареи могут устанавливаться как на подстанциях, так и непосредственно возле потребителей, тогда устройство подключается к их кабелям или шинам питания. В последнем случае обычно рассчитываются на индивидуальную компенсацию реактива конкретного двигателя или другого прибора – часто встречается на оборудовании в электрических сетях 0,4 кВ.

Централизованная компенсация выполняется либо на границе балансового раздела сетей, либо на подстанции, при чем может выполняться в высоковольтных сетях 110 кВ. Хороша тем, что разгружает высоковольтные линии, но плохо то, что не разгружаются линии 0,4 кВ и сам трансформатор. Этот способ дешевле остальных. При этом можно и централизованно разгрузить и низкую сторону 0,4 кВ, тогда УКРМ подключается к шинам, к которым подключена вторичная обмотка трансформатора, соответственно разгружается и он.

Также может быть и вариант групповой компенсации. Это промежуточный вид между централизованным и индивидуальным.
Другой способ – компенсация синхронными двигателями, которые могут компенсировать реактивную мощность. Проявляется, когда двигатель работает в режиме перевозбуждения. Такое решение используется в сетях 6 кВ и 10 кВ, также встречается и до 1000В. Преимуществом этого метода перед установкой конденсаторных батарей – возможность использования компенсатора для совершения полезной работы (вращения мощных компрессоров и насосов, например).
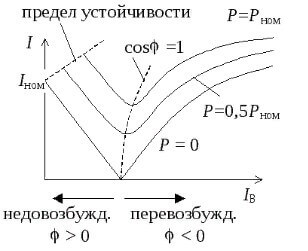
На графике изображена U-образная характеристика синхронного двигателя, которая отражает зависимость тока статора от тока возбуждения. Под ней вы видите, чему равен косинус фи. Когда он больше нуля – двигатель имеет емкостной характер, а когда косинус меньше нуля – нагрузка является емкостной и компенсирует реактивную мощность остальной части индуктивных потребителей.
Заключение
Подведем итоги, перечислив основные тезисы о компенсации реактивной энергии:
- Назначение – разгрузка линий электропередач и электрических сетей предприятий. В состав устройства могут входить антирезонансные дроссели для уменьшения уровня гармоник в сети.
- За неё не уплачивают счета частные лица, но платят предприятия.
- В состав компенсатора входят батареи конденсаторов или в этих же целях используют синхронные машины.
Также рекомендуем просмотреть полезные видео по теме статьи:
Материалы по теме:
В странах с хорошо развитой промышленностью от 60% до 70% электрической энергии потребляют промышленные предприятия. На промышленных предприятиях для приведения различных механизмов в движение используются электропривода. Там где не нужно высокой степени точности регулирования механизма, чаще всего, применяться привода переменного напряжения (асинхронные, синхронные). Известно, что двигатели переменного напряжения — основные потребители реактивной энергии.
Так как в отличии от частных потребителей, промышленные предприятия оборудуются еще и счетчиками реактивной энергии, поэтому ее компенсация является приоритетной задачей. Также если реактивная составляющая скомпенсирована, результирующий ток сети будет меньше, что позволит сэкономить на сечении кабелей для подключения нагрузки.
Разница между активной и реактивной составляющей регламентируется коэффициентом мощности cosφ. Определяется формулой cosφ=P/S, где P – активная, а S полная мощность.
Рассмотрим основные способы компенсации реактивной мощности:
- Конденсаторные установки – наиболее простой и дешевый способ. Суть состоит в том, что секции конденсаторов подключаются к сети через автоматический выключатель в зависимости от надобности.
 Конденсаторные установки
Конденсаторные установки
Конденсаторные батареи могут иметь множество различных схем подключения. На рис. 1 приведены лишь единичные примеры.
Фильтро-компенсирующие устройства (ФКУ) — представляет собой (L-C) фильтр, настроенный на определенные гармоники сети. Это позволяет не только компенсировать реактивную составляющую, но и улучшить гармонический состав сети.
 Схема фильтрокомпенсирующего устройства
Схема фильтрокомпенсирующего устройства
Фильтро-компенсирующие устройства (ФКУ) с декомпенсатором реактивной мощности или статический компенсатор – представляет собой тот же (L-C) фильтр, но с декомпенсатором, т.е. при изменении составляющей сети нет необходимости каждый раз подключать и отключать фильтр. ФКУ и декомпенсатор равны по мощности. Один из самых удобных способов компенсации, но и один из самых дорогих. Как правило полностью автоматизирован.
 Статический компенсатор или декомпенсатор реактивной мощности
Статический компенсатор или декомпенсатор реактивной мощности
 Синхронный компенсатор
Синхронный компенсаторВывод: существует несколько способов компенсации реактивной мощности на предприятии. Для выбора какого-то из устройств следует более детально изучить график нагрузки предприятия, работу преобразовательных устройств (наличие высших гармоник), а также схему электроснабжения предприятия (где целесообразней разместить компенсатор). Каждый из четырех приведенных вариантов существенно разнятся в цене. Поэтому при выборе устройства следует учесть все факторы и сделать правильный выбор.