В статье представлены драйверы реверсируемых двигателей постоянного тока общего назначения производства японской компании ROHM.
Японская компания ROHM представляет на рынке электронных компонентов драйверы реверсируемых двигателей постоянного тока общего назначения на основе технологии широко-масштабной интеграции LSI. Представленные драйверы могут быть трех видов: драйвер управления одним электродвигателем, двумя электродвигателями без стабилизации скорости, а также драйвер управ- ления одним электродвигателем с функцией стабилизации тока. Выбор необходимого драйвера и схемы включения можно сделать, основываясь на данных таблицы 1 и рис. 1–3. В основе всех драйверов реверсируемых двигателей постоянного тока лежит Н-мост на биполярных транзисторах, режим работы которого задается двумя логическими входами (табл. 2). При выборе драйвера необходимо руководствоваться величиной напряжения питания, мощностью электродвигателя, максимальным выходным током, рассеиваемой мощностью, наличием вспомогательной функции «термозащита» и «энергосбережение», возможностью установки выходного напряжения и работы с электронным регулятором скорости.
| Наименование | Напряжение питания, (В) | Мощность расс. (мВт) | Макс. выходной ток (мА) | Выход. режим* | Термо- защита |
Энерго- сбереже- ние |
Уст. выход. напряж. | Электрон- ный регулятор |
Корпус | |
| Управл. блок | Выход. блок | |||||||||
| Драйвер одного реверсируемого двигателя постоянного тока | ||||||||||
| BA6208/F | 4,5 | |||||||||
15
18
15
15
15
15
15
15
15
15
15
15
15
34
18
F — Forward (вперед), R — Reverse (реверсирование), S — Stop (стоп), B — Short brake (тормоз).
 Рис. 1. Драйвер одного электродвигателя постоянного тока
Рис. 1. Драйвер одного электродвигателя постоянного тока
Рис. 2. Драйвер двух электродвигателей постоянного тока
Рис. 3. Драйвер электродвигателя с регулятором скорости
Прибор BA6208 относится к группе простых драйверов одного реверсируемого двигателя постоянного тока и применяется в основном для управления двигателем кассетного магнитофона. Внутренняя схема драйвера BA6208 представлена на рис. 4. Управление драйвером осуществляется логическими сигналами, соответствующими ТТЛ-уровням.
Рис. 4. Внутренняя схема (типовая) драйвера BA6208
Таблица 2. Режимы работы драйвера одного реверсируемого двигателя постоянного тока
| Режим | Авх. (Fвх.) | В вх. (Rвх.) | Вых1 (Авых.) | Вых2 (Ввых.) |
| Вперед | 1 | 0 | 1 | 0 |
| Назад | 0 | 1 | 0 | 1 |
| Тормоз | 1 | 1 | 0 | 0 |
| Отключение | 0 | 0 | Z* | Z* |
Z* — разомкнутое состояние ключевого транзистора (OPEN)
Два управляющих входа (табл. 2) определяют четыре возможных режима работы драйвера: вращение вперед, назад (реверсирование), стоп и тормоз. В режиме торможения выводы электродвигателя соединяются с общим проводом питания, и осуществляется быстрый останов. В режиме «стоп» выводы электродвигателя отключаются от источника питания и останов происходит произвольно.
Основные характеристики драйвера BA6208:
- встроенные мощные (100 мА) транзисторы;
- режим торможения при высоких уровнях логического сигнала на обоих входах;
- встроенные диоды для защиты от бросков тока;
- очень низкий ток потребления в режиме standby, когда на обоих входах низкий логический уровень;
- широкий диапазон питающих напряжений 4,5–15 В;
- управление непосредственно ТТЛ-уровнями.
Таблица 3. Максимальные значения BA6208 (T a =25 °С)
| Параметр | Обозн. | Макс. | Ед. | |
| Напряжение питания | VCC | 18 | 8 | |
| Мощность расс. | BA6208 | Pd | 700* | мВт |
| BA6208F | Pd | 450** | мВт | |
| Рабочая температура | Topr | –40 +60 | °C | |
| Температура хранения | Tstg | –55+125 | °C | |
| Макс. выходной ток | Iout | 500 | мА | |
* понижается на 7 мВт на каждый 1 °С выше 25 °С
** понижается на 4,5 мВт на каждый 1 °С выше 25
Драйвер BA6209 аналогичен предыдущему, за исключением отсутствия режима «стоп». Основная область применения BA6209 — это кассетные магнитофоны и видеомагнитофоны.
Основные характеристики драйвера BA6208:
- мощные выходные транзисторы могут выдерживать ток до 1,6 А;
- обязательный режим торможения при останове двигателя;
- встроенные диоды для защиты от бросков тока;
- наличие вывода управления скоростью двигателя;
- низкий ток потребления в режиме standby (типовое значение Vcc=12 В, Io=5,5 мА);
- идентичные характеристики при изменении направления вращения;
- КМОП-уровни управления.
Рис. 5. Схема включения драйвера BA6209
Таблица 4. Максимальные значения (Ta=25 °С) BA6209
| Параметр | Обозн. | Макс. | Ед. | |
| Напряжение питания | VCC | 18 | 8 | |
| Мощность расс. | BA6209 | Pd | 2200* | мВт |
| BA6208N | Pd | 1000** | мВт | |
| Входное напряжение | Vin | –0,3 | ||
VCC
* понижается на 22 мВт на каждый 1 °С выше 25 °С ** понижается на 10 мВт на каждый 1 °С выше 25 °С *** изменяется на 1% при изм. длительности имп. на 3500 мкс.
Таблица 5. Описание выводов драйвера BA6209
| Номер вывода | Обозначение | Назначение |
| 1 | GND | Общий провод |
| 2 | OUT1 | Вывод подключения двигателя |
| 3 | VZ1 | Вывод подключения конденсатора для предотвращения одновременного включения вых. транзисторов |
| 4 | Vref | Вывод установки уровня «высокий». |
| 5 | FIN | Логический вход |
| 6 | RIN | Логический вход |
| 7 | VCC1 | Питание внутреннего блока управляющей логики |
| 8 | VCC2 | Питание выходного силового драйвера |
| 9 | VZ2 | Вывод подключения конденсатора для предотвращения одновременного включения вых. транзисторов |
| 10 | OUT2 | Вывод подключения двигателя |
 Рис. 6. Входной управляющий сигнал
Рис. 6. Входной управляющий сигнал
Для уменьшения мощности, рассеиваемой микросхемой, и в целях защиты от пробоя необходимо к выводу питания силового драйвера обязательно подключать последовательно резистор величиной 3–10 Ом. Время нарастания и спада управляющего логического сигнала (рис. 7) должно быть менее 5 мс, иначе возможна некорректная работа и выход из строя микросхемы.
Рис. 7. Схема включения драйвера BA6218
Потенциал общего вывода микросхемы должен быть всегда ниже потенциала других выводов. На входы нельзя подавать напряжение, пока микросхема не запитана. После подключения питания к выводу Vcc, на другие выводы не может быть подан потенциал выше, чем на Vcc.
Рис. 8. Схема включения драйвера BA6219B
Драйвер BA6218 рассчитан на максимальный выходной ток 0,7 А. Логическая часть и силовая имеют отдельные «земляные» выводы. При подключении электронного регулятора микросхема может использоваться для управляемого реверса и в режиме регулятора скорости. Управление режимами осуществляется по двум входам логическими сигналами с ТТЛ-уровнями.
Драйверы BA6219B и BA6219BFP-Y позволяют управлять скоростью вращения двигателя, изменяя прикладываемое напряжение. Выходной ток может достигать 2,2 А. Имеется встроенная защита от перегрева.
Рис. 9. Схема включения драйвера BA6229
Драйвер BA6229 потребляет в статическом режим всего 1 мА при напряжении питания Vcc=12 В. Диапазон питающих напряжений составляет 8–23 В. Входные управляющие уровни — КМОП.
Рис. 10. Блок-схема драйвера BA6229
Рис. 11. Схема включения драйвера BA6238A
BA6950FS (рис. 12) является драйвером реверсируемого коллекторного двигателя. Два логических входа позволяют управлять четырьмя возможными режимами работы. Скорость вращения задается произвольно, и управлять ею можно по отдельному выводу микросхемы. Встроенная схема температурной защиты срабатывает при достижении 175 °С и возврат в рабочий режим происходит при снижении температуры на 20 °С. Встроенная функция стабилизации частоты вращения реализована посредством контроля и коррекции потребляемого тока. Контроль тока осуществляется измерением падения напряжения на последовательном шунте и усилением сигнала рассогласования.
Рис. 12. Схема включения драйвера BA6950FS
Таблица 6. Режимы работы драйвера двух реверсируемых двигателей постоянного тока
RadioHata.RU
Портал радиолюбителя, начинающему радиолюбителю, Arduino, Raspberry Pi, книги по радиотехнике и электронике, простые схемы, схемы, радиотехнические журналы, видео, программы для радиолюбителя.
Download Mgzine: AudioXpress, Circuit Cellar, CQ Amateur Radio, Electronics For You, Elektronika dla Wszystkich, Elektorlabs, Elektor Magazine DVD, Elektronika Praktyczna, Elettronica In, ELV Journal, Funkamateur, Hi-Fi World, Klang+Ton, Nuts and Volts, Prakticka Elektronika A Radio, Practical Electronics, Practical Wireless, QST, Servo Magazine, Silicon Chip, Swiat Radio, The MagPi.
Скачать: Журнал Радио, Журнал Радиомир, Журнал Радиоаматор, Журнал Радиолоцман, Журнал Радиоконструктор, Журнал Радиосхема, Журнал Радиохобби, Журнал Ремонт и сервис, Журнал Компоненты и технологии, Журнал Электронная техника.
Скачать книги: Начинающему радиолюбителю, Телевидение и Радио, Источники питания, Для дома и быта, Прием-передача, Автолюбителю, Аудиотехника, Справочники, Учебники, Микроконтроллеры, Arduino, Raspberry Pi, Электроника, Электрика
Скачать: Программы для радиолюбителя, Видеокурсы.
STMicroelectronics – мировой лидер по производству микроконтроллеров. За последние десять лет компания совершила революцию и создала наиболее мощную экосистему на базе бюджетных семейств STM8 и STM32. Также STMicroelectronics может похвастаться интересными наработками в области управления электродвигателями. Иногда компания экспериментирует и выпускает на рынок инновационные специализированные продукты. Ярким примером этого является микросхема STSPIN32F0, объединяющая микроконтроллер с ядром ARM Cortex-M0 и систему управления электродвигателем.

Рис. 1. STSPIN32F0 – готовое решение для управления BLDC-моторами
Сложно ли управлять электродвигателем? Ответ на этот вопрос будет зависеть от типа двигателя и его мощности. При современном уровне развития электроники не возникает никаких проблем в случае с двигателями постоянного тока небольшой мощности – существующие интегральные решения позволяют организовывать их питание, контроль скорости вращения и положения даже без дополнительных внешних компонентов. Однако все усложняется, если мощность двигателя увеличивается. Это требует внешних силовых каскадов, а значит необходима громоздкая силовая печатная плата, учет паразитных индуктивностей, работа с высоковольтными сигналами. Еще хуже обстоит дело с управлением бесколлекторными BLDC-двигателями, даже если их мощность составляет единицы ватт.
Бесколлекторные BLDC-двигатели имеют явные преимущества перед обычными щеточными моторами: большой ресурс, простота обслуживания, высокий КПД. Интересно, что структура схемы управления такими двигателями мало чем отличается от схемы управления щеточными моторами (рис. 2). Тем не менее, долгое время они не были востребованы. Причиной этого была сложная система коммутации силового каскада.

Рис. 2. Упрощенная схема управления электродвигателем
Для управления бесколлекторными двигателями требуется как минимум трехфазный мост, включение плеч которого производится по сложному алгоритму. При этом, обратная связь по положению является обязательным компонентом системы управления (рис. 3). Коммутация обмоток происходит обычно по 6-шаговой схеме, при которой каждый следующий шаг делается только тогда, когда ротор двигателя находится в конкретном положении. Таким образом, для выполнения такого алгоритма переключений даже в самом простом случае требуется автомат состояний. Если же необходимо прецизионное управление с контролем скорости вращения при переменном моменте на валу, то без микроконтроллера не обойтись.
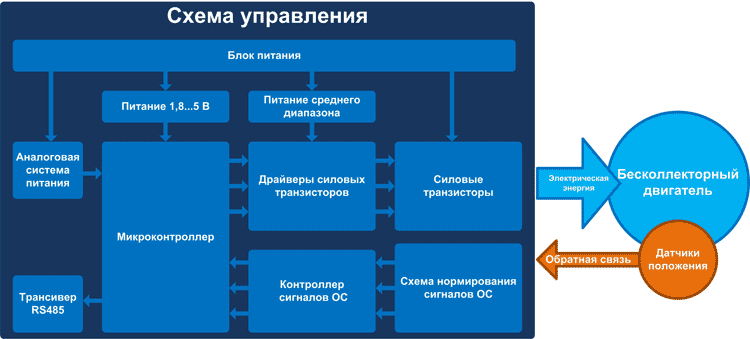
Рис. 3. Упрощенная функциональная схема управления BLDC-двигателями
Таким образом, для создания схемы управления BLDC-двигателем потребуется: микроконтроллер, драйверы трехфазного моста, сам трехфазный мост, датчики обратной связи ОС (или система измерения обратной ЭДС), система нормирования сигналов ОС (компараторы, операционные усилители и т. д.). Не стоит забывать и о необходимости развитой системы питания: низковольтный источник для цифровых микросхем, источник для питания драйверов и аналоговых схем (ОУ, АЦП, компараторы), мощный источник для двигателя. Если речь идет о настраиваемой системе, то в приведенный перечень потребуется добавить интерфейс с пользователем или канал связи, например, RS-485. Об обязательных элементах в виде разъемов и пассивных компонентов обвязки, можно даже не упоминать.
Как видно, список получается достаточно длинным, особенно если строить схему на дискретных компонентах. А теперь мысленно перенесите все это на печатную плату, и представьте, какой сложной она получается. Естественно, у любого здравомыслящего инженера появится вопрос: нельзя ли как-то упаковать хотя бы часть из всего перечисленного в корпус интегральной микросхемы? Действительно, ведь микроконтроллеры, регуляторы напряжения, драйверы, АЦП, ОУ, компараторы и другие компоненты выпускаются в интегральном исполнении. Однако, чтобы выполнить эту задумку, нужно иметь богатый опыт в проектировании полупроводников и SIP-систем (система в корпусе, System in Package). Такой опыт есть у STMicroelectronics, и он был использован при создании SIP-микросхемы STSPIN32F0.
STSPIN32F0– SIP-микросхема, созданная для управления работой трехфазных бесколекторных двигателей и позволяющая реализовывать различные методы определения положения ротора. STSPIN32F0 объединяет в одном корпусе значительную часть списка, приведенного выше (рис. 4):
- микроконтроллер STM32F031x6x7 с 32-битным ядром ARM ® Cortex ® -M0, рабочей частотой до 48 МГц, 4 кбайт ОЗУ, 32 кбайт FLASH и программированием по SWD;
- три полумостовых драйвера силовых транзисторов со встроенными бустрепными диодами и выходным током до 600 мА;
- четыре операционных усилителя для нормирования сигналов ОС от датчиков Холла или от бездатчиковой схемы;
- программируемый компаратор для контроля тока;
- встроенный DC/DC-регулятор 3,3 В с защитой от перегрузки, КЗ и перегрева для питания низковольтных схем;
- встроенный LDO 12 В с защитой от перегрева для питания драйверов, компараторов и ОУ;
- широкий выбор дополнительной периферии: 16 каналов ввода-вывода, 5 таймеров, 12-битный 9-канальный АЦП;
- коммуникационные интерфейсы: I2C, USART и SPI.
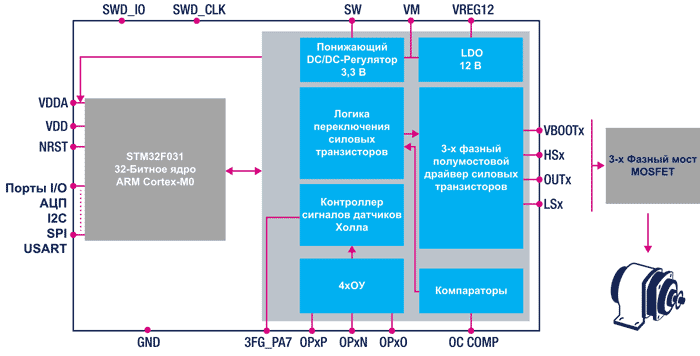
Рис. 4. Функциональная схема STSPIN32F0
Все эти функциональные блоки умещаются в корпусе размером всего 7 x 7 x 1,0 мм!
Контроллер STM32F031x6x7 хорошо известен пользователям STMicroelectronics. На субъективный взгляд автора статьи, это один из наиболее успешных микроконтроллеров на российском рынке, как в плане его собственной цены, так и в плане стоимости средств разработки и их доступности.
Отдельно стоит остановиться на встроенных драйверах мощных транзисторов. Они обеспечивают выходной ток до 600 мА, имеют логику защиты от сквозных токов и интегрированные бустрепные диоды. Все это приводит к минимальному количеству внешних компонентов (рис. 5).
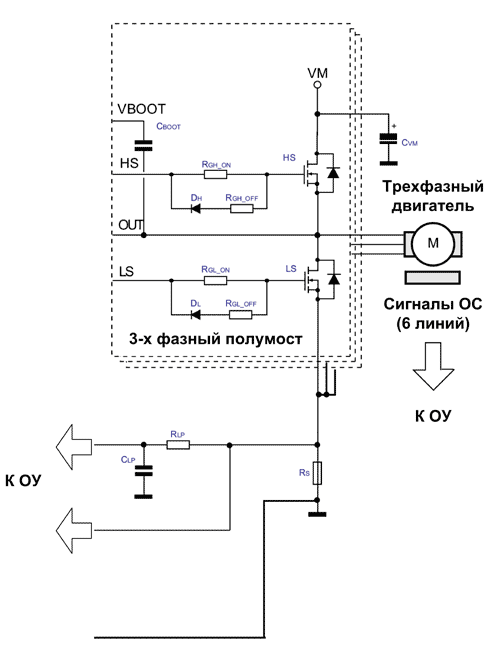
Рис. 5. Дополнительные внешние компоненты силовых каскадов при использовании STSPIN32F0
Как говорилось выше, обязательным компонентом системы управления бесколекторным двигателем является схема обработки сигналов ОС. Для этих целей в STSPIN32F0 предусмотрено четыре ОУ с размахом входного напряжения ±12 В (рис. 6). Они необходимы для нормирования сигналов от датчиков Холла либо сигналов обратной ЭДС в случае использования бездатчиковой схемы определения положения ротора. Контроль тока осуществляется с помощью ОУ или дополнительного программируемого компаратора, который защищает схему от перегрузок и КЗ.
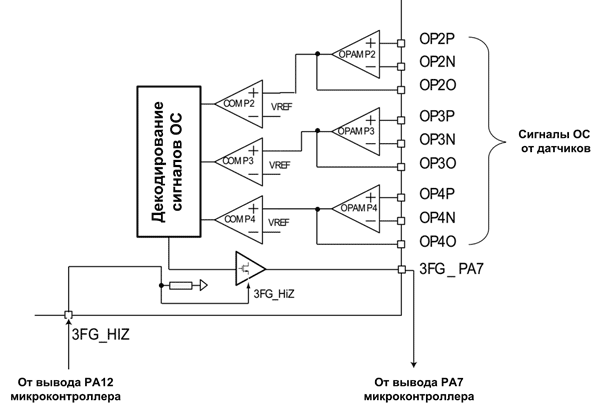
Рис. 6. Схема нормирования сигналов ОС
Благодаря наличию встроенных регуляторов 3,3 В и 12 В, схема питания максимально упрощается (рис. 7). При этом, диапазон напряжений составляет 8…45 В, а количество внешних компонентов остается минимальным.
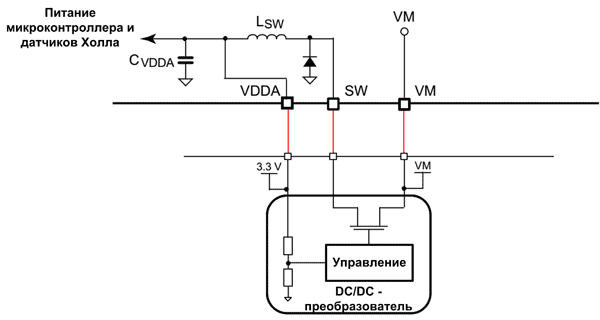
Рис. 7. Схема встроенного DC/DC-регулятора 3,3 В
Встроенный контроллер предоставляет пользователям ряд полезных функциональных блоков: порты ввода-вывода, многоканальный АЦП, таймеры, коммуникационные интерфейсы SPI, I2C, USART. Благодаря этому разработчик может создать полноценный привод с широким функционалом:
- управление скоростью вращения с учетом внешнего аналогового сигнала (тахометр, потенциометр управления);
- работа под управлением внешнего ПЛК с коммуникацией по протоколам на базе RS485/422;
- организация светодиодной индикации;
- организация интерфейса с пользователем с помощью клавиатур, кнопок;
- прием и передача дискретных сигналов.
Можно привести следующие примеры целевых приложений для STSPIN32F0: роботы, бытовая техника, квадрокоптеры, игрушки и многое другое. При этом, если учесть, что диапазон рабочих температур для STSPIN32F0 составляет-40…+125°C, то это делает возможным его использование и в промышленных приложениях.
Как было сказано выше, одним из основных достоинств продуктов STMicroelectronics является мощная поддержка в виде развитой системы средств разработки. STSPIN32F0 укладывается в программно-аппаратную платформу STM32 и имеет собственную отладочную плату STEVAL-SPIN3201 (рис. 8).
STEVAL—SPIN3201 – пример реализации привода для бесколлекторного двигателя с рабочими напряжениями 8…45 В и выходным током до 15 А. Кроме микросхемы контроллера STSPIN32F0, на плате размещен мощный трехфазный мост на базе MOSFETSTD140N6F7. Для контроля тока предлагается использовать шунтовые резисторы. Также на плате располагается программатор-отладчик ST-LINK/V2-1, который подключается к ПК с помощью разъема mimiUSB и без проблем позволяет начать работу со встроенным микроконтроллером STM32F031. К услугам разработчиков предлагаются традиционные элементы отладочных плат: светодиоды, разъемы, кнопки и подстроечные резисторы.

Рис. 8. Внешний вид отладочной платы STEVAL-SPIN3201
Характеристики контроллера STSPIN32F0:
- встроенный контролер STM32F031x6x7: ядро 32-битное ARM ® Cortex ® -M0, рабочая частота до 48 МГц, 4 кбайт ОЗУ, 32 кбайт FLASH, программирование SWD;
- три полумостовых драйвера силовых транзисторов: выходной ток 600 мА, встроенные бустрепные диоды, защита от сквозных токов;
- четыре операционных усилителя для нормирования сигналов ОС;
- компаратор для контроля тока;
- схема декодирования сигналов ОС: от датчиков Холла и от бесдатчиковой схемы;
- встроенный DC/DC-регулятор 3,3 В с защитой от перегрузки, КЗ и перегрева;
- встроенный LDO 12 В с защитой от перегрева;
- широкий выбор дополнительной периферии: 16 каналов ввода-вывода, 5 таймеров, 12-битный 9-канальный АЦП;
- коммуникационные интерфейсы: I2C, USART иSPI;
- напряжение питания: 8…45 В;
- диапазон рабочих температур: -40…+125°C;
- корпус: 7x7x1,0мм VFQFPN-48L.
Характеристики отладочного набора STEVAL-SPIN3201:
- выходной ток 15 А;
- силовой 3-фазный мост на базе MOSFET STD140N6F7;
- поддержка STM32 PMSM FOC Software Development Kit (STSW-STM32100);
- встроенный отладчик ST-LINK/V2-1;
- напряжение питания: 8…45 В;
- три шунта для контроля тока;
- пользовательские кнопки и подстроечные резисторы.






