Характерной особенностью электродвигателя с независимым возбуждением, является то, что его ток возбуждения Iв не зависит от тока Iя в обмотке якоря (тока нагрузки). Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток возбуждения двигателя Ф не зависит от нагрузки. При этом условии получим, что зависимости электромагнитного момента М и частоты вращения n от тока Iя будут линейными. Следовательно, линейной будет и механическая характеристика двигателя — зависимость n (М) (рис.).

У двигателя с параллельным возбуждением в цепь обмотки возбуждения включен регулировочный реостат Rрв, а в цепь обмотки якоря — пусковой реостат Rп. В рассматриваемом электродвигателе имеет место, по существу, раздельное питание цепей обмоток якоря и возбуждения, вследствие чего ток возбуждения Iв не зависит от тока обмотки якоря Iв. Поэтому электродвигатель с параллельным возбуждением будет иметь такие же характеристики, как и двигатель с независимым возбуждением. Однако двигатель с параллельным возбуждением работает нормально только при питании от источника постоянного тока с неизменным напряжением. Двигатели с параллельным возбуждением применяются для привода станков и различных механизмов, требующих широкой, но жесткой регулировки скорости.
У двигателя последовательного возбуждения якорная обмотка и обмотка возбуждения включены последовательно. Ток возбуждения двигателя одновременно является током якоря. Магнитный поток индуктора пропорционален току якоря.

где k — коэффициент пропорциональности.
Момент на валу двигателя пропорционален квадрату тока якоря.

 .
.
Уравнение механической характеристики двигателя последовательного возбуждения выглядит следующим образом:
 .
.
Механическая характеристика двигателя последовательного возбуждения является мягкой и имеет гиперболический характер (рис. ниже ). При малых нагрузках магнитный поток Ф сильно уменьшается, частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Работа двигателя последовательного возбуждения без нагрузки недопустима. Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.).

Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют, особенно там, где имеют место изменения нагрузочного момента в широких пределах и тяжелые условия пуска: во всех тяговых приводах (электровозы, тепловозы, электропоезда, электрокары, электропогрузчики и пр.), а также в приводах грузоподъемных механизмов (краны, лифты и пр.). Объясняется это тем, что при мягкой характеристике увеличение нагрузочного момента приводит к меньшему возрастанию тока и потребляемой мощности, чем у двигателей с независимым и параллельным возбуждением; поэтому двигатели с последовательным возбуждением лучше переносят перегрузки. Кроме того, эти двигатели имеют большой пусковой момент, чем двигатели с параллельным и независимым возбуждением, так как при увеличении тока обмотки якоря при пуске соответственно увеличивается и магнитный поток.
Электродвигатель со смешанным возбуждением. В этом электродвигателе (рис.) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной (или независимой) и последовательной, по которым проходят токи возбуждения Iв1 и Iв2 = Iя. Поэтому
где Фпосл — магнитный поток последовательной обмотки, зависящий от тока Iя; Фпар — магнитный поток параллельной обмотки, который не зависит от нагрузки (определяется током возбуждения Iв1).
Механическая характеристика электродвигателя со смешанным возбуждением (рис.) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения магнитодвижущих сил параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (кривая 3 при малой м. д. с. последовательной обмотки) или к характеристике 2
Двигатель смешанного возбуждения имеет механическую характеристику, представляющую собой нечто среднее между механическими характеристиками двигателя параллельного и последовательного возбуждения.
(кривая 4 при малой м. д. с. параллельной обмотки). Достоинством двигателя со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, когда Фпосл = 0. В этом режиме частота вращения его якоря определяется магнитным потоком Фпар и имеет ограниченное значение (двигатель не идет вразнос).
Характерной особенностью ДПТ с ПВ является то, что его обмотка возбуждения (ПОВ) с сопротивлением посредством щеточно-коллекторного узла последовательно соединена с обмоткой якоря с сопротивлением , т.е. в таких двигателях возможно только электромагнитное возбуждение.


Принципиальная электрическая схема включения ДПТ с ПВ представлена на рис.3.1.

Рис. 3.1. Схема электрическая принципиальная включения ДПТ с ПВ.
Для осуществления пуска ДПТ с ПВ последовательно с его обмотками включается добавочный реостат .

Уравнения электромеханической характеристики ДПТ с ПВ
Ввиду того, что в ДПТ с ПВ ток обмотки возбуждения равен току в обмотке якоря, в таких двигателях в отличие от ДПТ с НВ проявляются интересные особенности.
Поток возбуждения ДПТ с ПВ связан с током якоря (он же является и током возбуждения) зависимостью, называемой кривой намагничивания, представленной на рис. 3.2.
Как видно зависимость для малых токов близка к линейной, а с увеличением тока проявляется нелинейность, связанная с насыщением магнитной системы ДПТ с ПВ. Уравнение электромеханической характеристики ДПТ с ПВ так же и для ДПТ с независимым возбуждением имеет вид:



Рис. 3.2. Кривая намагничивания ДПТ с ПВ.
Из-за отсутствия точного математического описания кривой намагничивания, при упрощенном анализе можно пренебречь насыщением магнитной системы ДПТ с ПВ, т. е. принять зависимость между потоком и током якоря линейной, как это показано на рис. 3.2 пунктирной линией. В этом случае можно записать:
где — коэффициент пропорциональности.
Для момента ДПТ с ПВ с учетом (3.17) можно записать:

Из выражения (3.3) видно, что в отличие от ДПТ с НВ у ДПТ с ПВ электромагнитный момент зависит от тока якоря не линейно, а квадратично.
Для тока якоря можно в этом случае записать:

Если подставить выражение (3.4) в общее уравнение электромеханической характеристики (3.1), то можно получить уравнение для механической характеристики ДПТ с ПВ:



Отсюда следует, что при ненасыщенной магнитной системе механическая характеристика ДПТ с ПВ изображается (рис. 3.3) кривой, для которой ось ординат является асимптотой.

Рис. 3.3. Механическая характеристика ДПТ с ПВ в предположении ненасыщенности его магнитной цепи.
Значительное увеличение скорости вращения двигателя в области малых нагрузок обуславливается соответствующим снижением величины магнитного потока.
Уравнение (3.5) является оценочным, т.к. получено при допущении о ненасыщенности магнитной системы двигателя. На практике по экономическим соображениям электродвигатели рассчитываются с определенным коэффициентом насыщения и рабочие точки лежат в районе колена перегиба кривой намагничивания.
В целом, анализируя уравнение механической характеристики (3.5), можно сделать интегральный вывод о «мягкости» механической характеристики, проявляющейся в резком уменьшении скорости при увеличении момента на валу двигателя.
Если рассматривать механическую характеристику, изображенную на рис. 3.3 в области малых нагрузок на валу, то можно сделать вывод, что понятие скорости идеального холостого хода для ДПТ с ПВ отсутствует, т. е. при полном сбросе момента сопротивления двигатель идет в «разнос». При этом его скорость теоретически стремится к бесконечности.
С увеличением нагрузки скорость вращения падает и равняется нулю при значении момента короткого замыкания (пускового):

Далее скорость вращения асимптотически приближается к значению в 4 квадранте системы координат.
Как видно из (3.21) у ДПТ с ПВ пусковой момент при отсутствии насыщения пропорционален квадрату тока короткого замыкания- При конкретных расчетах пользоваться оценочным уравнением механической характеристики (3.5) нельзя. В этом случае построение характеристик приходится вести графо-аналитическими способами. Как правило, построение искусственных характеристик производится на основании данных каталогов, где приводятся естественные характеристики: и .
Реальный ДПТ с ПВ
В реальном ДПТ с ПВ вследствие насыщения магнитной системы но мере увеличения нагрузки на валу (а, следовательно, и тока якоря) в области больших моментов, наблюдается прямая пропорциональность между моментом и током, поэтому механическая характеристика становится там практически линейной. Это относится как к естественной, так и к искусственным механическим характеристикам.
Кроме того, в реальном ДПТ с ПВ даже в режиме идеального холостого хода существует остаточный магнитный поток , вследствие чего скорость идеального холостого хода будет иметь конечную величину и определяться выражением:

Но так как величина незначительна, то может достигать значительных величин. Поэтому у ДПТ с ПВ, как правило, запрещается сбрасывать нагрузку на валу более чем на 80% отноминальной.


Исключением являются микродвигатели, у которых и при полном сбросе нагрузки остаточный момент трения достаточно велик для того, чтобы ограничить скорость холостого хода. Склонность ДПТ с ПВ идти в «разнос» ведет к тому, что их роторы выполняются механически усиленными.
Сравнение пусковых свойств двигателей с ПВ и НВ
Как следует из теории электрических машин, двигатели рассчитываются на конкретный номинальный ток . При этом ток короткого замыкания не должен превышать значения

где — коэффициент перегрузки по току, который обычно лежит в диапазоне от 2 до 5.
В случае, если имеются два двигателя постоянного тока: один с независимым возбуждением, а второй с последовательным возбуждением, рассчитанные на одинаковый ток , то допустимый ток короткого замыкания у них также будет одинаковым, в то время как пусковой момент у ДПТ с НВ будет пропорционален току якоря в первой степени:


а у идеализированного ДПТ с ПВ согласно выражению (3.6) квадрату тока якоря;

Из этого следует, что при одинаковой перегрузочной способности пусковой момент ДПТ с ПВ превосходит пусковой момент ДПТ с НВ.
При прямом пуске двигателя ударные значения тока , поэтому обмотки двигателя могут быстро перегреться и выйти из строя, кроме того большие токи негативно влияют и на надежность щеточно-коллекторного узла.
(Оказанное обуславливает необходимость ограничения до какой-либо приемлемой величины либо введением в якорную цепь дополнительного сопротивления , либо уменьшением питающего напряжения .
Величина максимально допустимого тока определяется коэффициентом перегрузки .

Для микродвигателей обычно осуществляется прямой пуск без добавочные сопротивлений, но с ростом габаритов ДПТ необходимо производить реостатный пуск. особенно, если привод с ДПТ с ПВ используется в нагруженных режимах с частыми пусками и торможениями.
Способы регулирования угловой скорости вращения ДПТ с ПВ
Как следует из уравнения электромеханической характеристики (3.1) угловую скорость вращения можно регулировать, как и у ДПТ с НВ, изменением , и .
Регулирование скорости вращения изменением питающего напряжения
Как следует из выражения механической характеристики (3.1) при изменении питающего напряжения можно получить семейство механические характеристик, изображенных на рис. 3.4. При этом величина напряжения питания регулируется, как правило, при помощи тиристорных преобразователей напряжения или систем «Генератор-двигатель».

Рис 3.4. Семейство механических характеристик ДПТ с ПВ при различных значениях напряжения питания якорной цепи
В двигателе последовательного возбуждения, который иногда называют сериесным, обмотка возбуждения включена последовательно с обмоткой якоря (рис. 1). Для такого двигателя справедливо равенство Iв=Ia=I, следовательно, его магнитный поток Ф зависит от нагрузки Ф=f(Ia). В этом главная особенность двигателя последовательного возбуждения и она определяет его свойства.
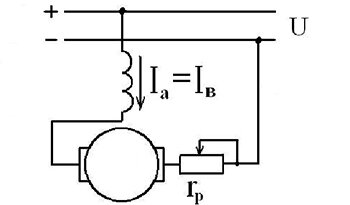
Рис. 1 — Схема электродвигателя последовательного возбуждения
Скоростная характеристика представляет зависимость n=f(Ia) при U=Uн. Она не может быть точно выражена аналитически во всем диапазоне изменения нагрузки от холостого хода до номинальной из-за отсутствия прямой пропорциональной зависимости между Ia и Ф. Приняв допущение Ф=кIa, запишем аналитическую зависимость скоростной характеристики в виде
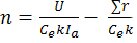
При увеличении тока нагрузки гиперболический характер скоростной характеристики нарушается и приближается к линейному, так как при насыщении магнитной цепи машины с увеличением тока Ia магнитный поток остается практически постоянным (рис. 2). Крутизна характеристики зависит от величины ?r.
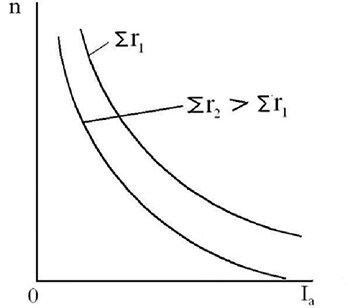
Рис. 2 — Скоростные характеристики двигателя последовательного возбуждения
Таким образом, скорость сериесного двигателя резко изменяется с изменением нагрузки и такая характеристика называется «мягкой».
При малых нагрузках (до 0,25 Iн) скорость двигателя последовательного возбуждения может возрасти до опасных пределов (двигатель идет «вразнос»), поэтому работа таких двигателей на холостом ходу не допускается.
Моментная характеристика — это зависимость M=f(Ia) при U=Uн. Если предположить, что магнитная цепь не насыщена, то Ф=кIa и, следовательно , имеем
Это уравнение квадратичной параболы.
Кривая моментной характеристики изображена на рисунке 3.8. По мере увеличения тока Ia магнитная система двигателя насыщается, и характеристика постепенно приближается к прямой.
Рис. 3 — Моментная характеристика двигателя последовательного возбуждения
Таким образом, электродвигатель последовательного возбуждения развивает момент, пропорциональный Ia 2 , что и определяет главное его преимущество. Так как при пуске Ia=(1,5..2)Iн, то двигатель последовательного возбуждения развивает значительно больший пусковой момент по сравнению с двигателями параллельного возбуждения, поэтому он широко используется в условиях тяжелых пусков и при возможных перегрузках.
Механическая характеристика представляет собой зависимость n=f(M) при U=Uн. Аналитическое выражение этой характеристики может быть получено только в частном случае, когда магнитная цепь машины ненасыщенна и поток Ф пропорционален току якоря Ia. Тогда можно записать
Решая совместно уравнения , получаем
т.е. механическая характеристика двигателя последовательного возбуждения, также как и скоростная, имеет гиперболический характер (рис. 4).
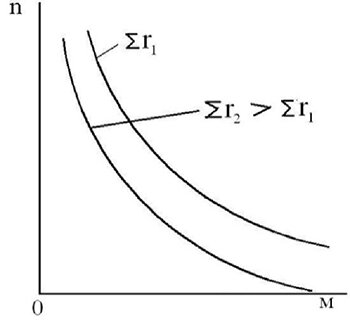
Рис. 4 — Механические характеристики двигателя последовательного возбуждения
Характеристика КПД двигателя последовательного возбуждения имеет обычный для электродвигателей вид (рис. 2 ).






