Синхронный двигатель применяется для приводов механизмов, скорость которых не регулируется. Синхронный двигатель имеет достаточно высокий cosj, КПД, обладает повышенной надежностью, вследствии значительного воздушного зазора между статором и ротором двигателя. Синхронный двигатель чаще всего используется в установках с длительным режимом работы, особенно для приводов большой мощности. Двигатель применяется для привода компрессора и насосов, как двигатель-генератор, для приводов средней мощности бумажной и цементной промышленности и т.д.
В настоящее время в связи с развитием полупроводниковых технологий появился регулируемый электропривод на базе синхронного двигателя, где регулирование производится изменением частоты питающего напряжения.
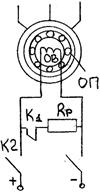
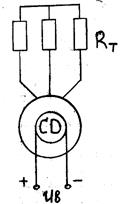
На статоре вложена трехфазная обмотка, на роторе обмотка возбуждения и пусковая обмотка. При пуске обмотку возбуждения включают на разрядное сопротивление Rр. При достижении скорости 0,95w0 подается возбуждение и включается Rр. Двигатель втягивается в синхронизм. Rр=(5¸10)Rов.
Если взять Rр достаточно большим, то в обмотке возбуждения наблюдается большие перенапряжения, если взять — малым, то искажается пусковая характеристика синхронного двигателя. Пусковая характеристика от обмотки «беличья клетка» аналогична асинхронному двигателю.
Синхронный двигатель выполнен с пусковыми клетками двух типов, что позволяет получить различные характеристики необходимые для различных механизмов.
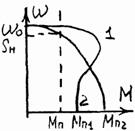
Для второй характеристики, вследствие повышения активного сопротивления «беличьей клетки», соответствует наибольший пусковой момент. Но ей соответствует большее скольжение при номинальном моменте, что затрудняет вхождение в синхронизм. Двигатель с такой пусковой характеристикой применяется для механизмов с большим пусковым моментом.
Первая характеристика используется для механизмов при вентиляторном моменте.
Устойчивость системы синхронного двигателя характеризуется угловой характеристикой или зависимостью момента от угла внутреннего сдвига фаз между вектором ЭДС и напряжением сети.
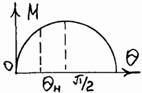
qн=(25¸30) эл. град. – номинальная L нагрузки.
Устойчивая область работы двигателя от 0 до p/2.
 ;
;  ;
;
 ;
;  — при 90 0 .
— при 90 0 .
 .
.
Анализ зависимостей момента от q показывает, что асинхронный двигатель менее чувствителен к снижению напряжения, чем синхронный двигатель.
Наибольшее значение момента, характеризующего перегрузочную способность синхронного двигателя, наблюдается при угле согласования q=p/2 . При этом будет максимальный момент
 .
.
Вместе с тем важной характеристикой работы синхронного двигателя является величина угла рассогласования, который находится в пределах 30 0 -25 0 =qн. Этот угол характеризует двигательный режим работы двигателя по условиям нагрева.
Для повышения устойчивости работы синхронного двигателя при ударных нагрузках применяют автоматическое поддержание ЭДС двигателя за счет перевозбуждения двигателя.
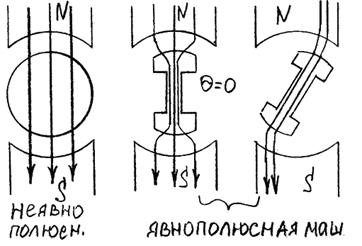
Для неявнополюсной машины момент при синхронной скорости может возникнуть только при наличии тока в обмотке возбуждения при явнополюсной машине, момент возникает и без возбуждения синхронного двигателя. Здесь возникает реактивный момент, который старается так повернуть полюса машины, чтобы сохранить минимальным магнитное сопротивление по продольной оси.
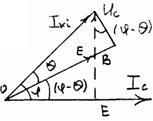
Синхронный двигатель отличается от другой машины тем, что с его помощью можно регулировать потребление реактивной энергии. Это объясняется тем, что если принять активное сопротивление статора равным нулю, то ЭДС двигателя без нагрузки будет равна напряжению сети. Она определяется результирующим магнитным полем, намагничивающих сил статора и намагничивающих сил обмотки возбуждения, и, в этом случае когда ток возбуждения отсутствует, весь поток создается статором, синхронный двигатель потребляет реактивный ток и тот отстает от напряжения сети на 90 0 . Если машину возбудить, то часть результирующих намагничивающих сил будет создана обмоткой возбуждения и тогда намагничивающий ток статора, а следовательно и потребляемая энергия из сети уменьшится. Дальнейшее увеличение возбуждения двигателя приведет к размагничиванию магнитной системы двигателя.
Перевозбуждение машины заставляет работать двигатель в емкостном квадранте, работать генератором реактивной энергии. Синхронный двигатель характеризуется U-образными характеристиками, это зависимость полного тока статора от тока возбуждения при различных нагрузках.
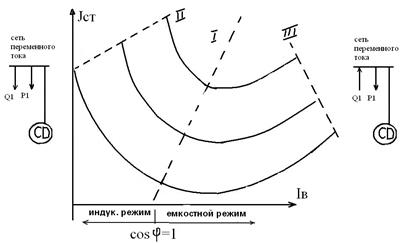

Кривая II – характеризует границу устойчивости статической работы двигателя.
Кривая I – регулировочная характеристика двигателя при cosj=1.
Кривая III – соответствует верхней границе возбуждения двигателя по условиям нагрева двигателя и самораскачивания.
Синхронный двигатель может работать в тех же тормозных режимах, что и асинхронный и другие двигатели, т.е. режим с рекуперацией энергии в сеть, режим динамического торможения и режим противовключения.
1)  2)
2) 
Торможение противовключением. В этом случае происходит изменение чередования фаз, обмотка возбуждения закорачивается на разрядное сопротивление.
Устройство синхронного электродвигателя таково, что он развивает вращающий момент только при условии вращения его ротора синхронно с магнитным полем статора. Для обеспечения разгона синхронного электродвигателя его ротор снабжают специальной короткозамкнутой пусковой обмоткой.
В пазы полюсных наконечников укладывают стержни пусковой обмотки и замыкают ее накоротко короткозамыкающими кольцами. При этом при подключении статорной обмотки синхронной электрической машины в сеть она будет запускаться как обычный асинхронный электродвигатель с КЗ ротором. Пусковой момент будет создаваться взаимодействием магнитных потоков статора и короткозамкнутого ротора и, соответственно, электродвигатель будет разгонятся. Когда скорость ротора достигнет «подсинхронной», а это 95% — 98% синхронной, на обмотку возбуждения подают постоянный ток (ток возбуждения), после чего двигатель втягивается в синхронизм. Механическая характеристика синхронной машины при пуске будет иметь две характерные точки:
- Пусковой момент Мпуск, который двигатель может развить при неподвижном состоянии (S = 1);
- Входной или подсинхронный момент Мвх, который развивает синхронный электродвигатель при 95% синхронной скорости (S ≈ 0.05).
В зависимости от назначения, а также условий работы электропривода, требуются различные соотношения между данными моментами и различные их величины.
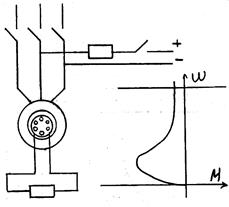
Чем больше будет сопротивление пусковой обмотки, тем будет больше критическое скольжение, которое влияет на максимум момента. Соответственно поменяется и величина пускового момента при S = 1, а также подсинхронного S = 0,05; величина последнего довольно существенна при вхождении в синхронизм. Чем будет больше подсинхронный момент, тем больше будет скорость, к которой сможет разогнаться синхронный электродвигатель а режиме асинхронного и, соответственно, ему будет легче втянутся в синхронизм. Механическая характеристика для асинхронного режима показана ниже:

Из данной фигуры мы можем увидеть, что увеличивая подсинхронный момент мы уменьшаем пусковой, и наоборот. Поэтому выбирая синхронный электродвигатель для конкретного механизма необходимо всегда согласовать пусковые характеристики электродвигателя и рабочего механизма Мс = φ(n).
При асинхронном пуске ток статора будет больше номинального в несколько раз Iпуск = 3÷5Iном. Чтоб снизить этот ток понижают напряжение на обмотках статора. Для этого используют пусковые реакторы или автотрансформаторы. При этом величина пускового тока будет снижена пропорционально напряжению на статоре, но при этом снизится пусковой и критический моменты пропорционально квадрату напряжения. Благодаря развитию современных технологий используют для пуска преобразователи частоты, но этот вид пуска мы рассмотрим в отдельной статье.
Также пусковые характеристики будут во многом зависеть от перегрузочной способности синхронной машины в нормальном режиме. Перегрузочная способность возрастет с увеличением воздушного зазора, однако такое увеличение приведет к увеличению потока рассеивания, что в свою очередь приведет к уменьшению моментов при асинхронном пуске. В связи с такой противоречивостью условий пуска и перегрузочной способности приходится принимать некоторые средние параметры, при которых характеристики двигателя в наибольшей степени отвечают всем поставленным требованиям.
В процессе пуска также непосредственное участие принимает и обмотка ротора. В начальной стадии пуска в ней индуктируется довольно значительная ЭДС, которая может привести к пробою изоляции (если оставить ее в разомкнутом виде). Поэтому обмотку ротора замыкают на активное сопротивление в 10 – 12 раз больше чем сопротивление самой обмотки. Замыкание роторной обмотки в процессе пуска накоротко не рекомендуется, так как из-за явления одноосного включения возможно значительное уменьшения пускового момента при половине синхронной скорости. Это может привести к устойчивой работе электродвигателя при пониженной скорости.
Физически данное явление можно объяснить так. Вращающееся поле статора будет индуктировать в обмотке ротора ЭДС частоты скольжения f2 = f1S. Данная ЭДС инициирует появления тока, который создаст пульсирующую МДС. Эту МДС, в свою очередь, можно разложить на две составляющие F1 и F2, которые вращаются относительно ротора в разные стороны, но с одинаковыми скоростями n2 = ±(n0 — n). То есть получается аналогичная картина режиму с введением в цепь ротора асинхронной машины несимметричных сопротивлений.
МДС F1 относительно статора будет вращаться со скоростью:

Данная МДС будет создавать дополнительный вращающий момент, который будет суммироваться с вращающим моментом от пусковой обмотки.
МДС F2 создаст обратно-синхронное поле, которое вращается со скоростью относительно статора:

При этом в статоре будет индуктироваться ЭДС частоты:

Данная ЭДС обусловит токи в статоре, которые замыкаясь через сеть будут взаимодействовать с обратно-синхронным полем ротора и создавать дополнительный момент, величина которого зависит от скорости вращения синхронной машины. При n = 0.5n0 частота тока в статоре f3 = 0 и дополнительный момент тоже будет равен нулю. При n 0.5n0 поток, создаваемый МДС F2 ротора, будет вращаться согласно с ротором, и вращающий момент будет отрицательным, то есть тормозным:

Просуммировав кривую 3, создаваемую МДС F2, с моментами создаваемыми МДС пусковой обмотки 1 и МДС F1 обмотки 2, получим результирующую механическую характеристику в пусковом режиме синхронного электродвигателя 4. Провал в характеристике 4 при скорости, близкой к 0,5n0, может стать причиной «застревания» синхронного электродвигателя на промежуточной скорости. Данное явления может реализоваться в случае если Мс>Ммин.
Влияние одноосного включения можно убрать путем включения в цепь обмотки возбуждения на время пуска добавочного сопротивления. При этом максимум момента от МДС F1 сместится в сторону большего скольжения, а момент от МДС F2 уменьшится по величине.
Пусковая характеристика синхронного электродвигателя (показанная выше) построена при упрощенном рассмотрении явлений. В действительности при пуске синхронного электродвигателя играют роль еще и моменты от вихревых токов в полюсных наконечниках, реактивный и гистерезисный моменты. Явнополюсное строение ротора изменяет его магнитное сопротивление в зависимости от его положения. Отсутствие стержней пусковой обмотки в междуполюсном пространстве приводит к несимметричности обмотки. Оба эти явления способствуют появлению пульсаций момента и, следовательно, периодических изменений скольжения. Точный учет всех факторов и получения максимально приближенной к реальной математической модели пусковой характеристики весьма сложная задача. При практических расчетах следует пользоваться пусковыми характеристиками приводимыми в каталогах.
Синхронный двигатель состоит из статора с обмоткой, которая включается в сеть трехфазного тока и выполняет роль якоря машины, и ротора с обмоткой, которая получает питание от постороннего источника постоянного тока и выполняет роль индуктора машины.
Вращающий момент двигателя определяется по формуле

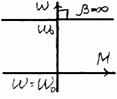
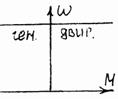
В синхронных двигателях с увеличением нагрузки частота вращения не меняется, а увеличивается угол 0, поэтому механическая характеристика будет абсолютно жесткой (рис. 7.4, а), а для определения величины моментов используют угловую характеристику синхронного двигателя (рис. 7.4,6)—зависимость М = Дв).
Из угловой характеристики видно, что в левой части ее с увеличением угла 0 момент вращения М увеличивается, в правой части с увеличением угла 0 момент уменьшается. Таким образом, устойчивая работа двигателя возможна только на левой части характеристики.

Обычно угол 0 — 20 — 30° соответствует номинальному моменту электродвигателя МНОм. Перегрузочная способность синхронного двигателя X = 2 ч- 2,5.
В зависимости от величины тока возбуждения двигатель может работать с cos q> меньше единицы (ток возбуждения меньше номинального) или равным единице (ток возбуждения равен номинальному). При перевозбуждении синхронный двигатель вырабатывает реактивную энергию и отдает ее в сеть переменного тока. Это свойство двигателя используется для улучшения cos ф сети.
Синхронные двигатели применяются для привода крупных, редко отключаемых машин (компрессоров, вентиляторов, насосов).
Регулирование частоты вращения двигателей переменного тока может быть осуществлено за счет изменения частоты тока, числа пар полюсов, включения в цепь ротора дополнительных активных сопротивлений, введения в цепь ротора дополнительной э. д. с. Для электродвигателей с короткозамкнутыми роторами возможности регулирования частоты вращения ограничены, так как изменение частоты тока требует установки дополнительного оборудования, изменение числа пар полюсов требует выполнения специальной обмотки в статоре и пересоединения ее в процессе эксплуатации, а включение дополнительных сопротивлений в цепь ротора выполнить невозможно.
Практически нерегулируем и синхронный двигатель, а в электродвигателях с фазным ротором регулирование частоты вращения достигается за счет ввода в цепь ротора дополнительных активных сопротивлений. Данный способ неэкономичен, так как расходуется электроэнергия на нагрев реостата и уменьшается мощность на валу двигателя.






