Обычная схема включения двигателя постоянного тока независимого возбуждения представлена на рис. 3.1. Якорь двигателя М и его обмотка возбуждения ОВ обычно получают питание от разных, независимых друг от друга источников (преобразователей) напряжения U
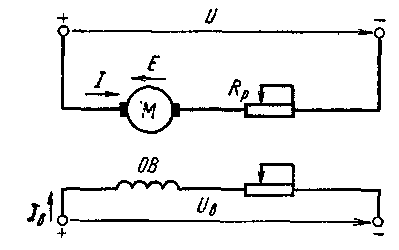
Рис. 3.1. Схема включения двигателя постоянного тока независимого возбуждения.
и UB, что позволяет отдельно регулировать напряжение на якоре двигателя и на обмотке возбуждения и выполнять их на разное номинальное напряжение. Лишь при наличии сети постоянного тока или при нерегулируемом преобразователе в якорной цепи обмотка возбуждения питается от того же источника напряжения, что и якорь двигателя. Но и в этом случае ток возбуждения Iв не зависит от тока I якоря двигателя.
Направления тока I и ЭДС вращения двигателя Е, показанные на рис. 3.1, соответствуют двигательному режиму работы, когда электрическая энергия потребляется двигателем из сети (от источника напряжения U) и преобразуется в механическую энергию, мощность которой равна Р = Мω. Зависимость же между М и ω двигателя определяется его механической характеристикой.
Аналитическое выражение механической характеристики двигателя может быть получено из уравнения равновесия напряжений, составленного для якорной цеди схемы (рис. 3.1). При установившемся режиме работы двигателя приложенное напряжение U, В, уравновешивается падением напряжения в якорной цепи IR и наведенной в якоре ЭДС вращения Е, В, т. е.
здесь I — ток в якорной цепи двигателя, A; R — суммарное сопротивление якорной цепи, Ом, включающее внешнее сопротивление резистора Rp и внутреннее сопротивление якоря двигателя Rя (при наличии дополнительных полюсов учитывается и их сопротивление);
где k — коэффициент, зависящий от конструктивных данных двигателя, k = pN/2πa (p — число пар полюсов двигателя; N — число активных проводников обмотки якоря; а — число пар параллельных ветвей обмотки якоря); Ф и ω — соответственно магнитный поток, Вб, и угловая скорость двигателя, рад/с.
Если в (3.1) вместо Е подставим ее значение Е из (3.2), то получим уравнение для скорости двигателя
Уравнение (3.3) представляет собой зависимость скорости двигателя от тока якоря. Такую зависимость ω = f(I) называют электромеханической ха-рактеристикой двигателя.
Для получения уравнения механической характеристики необходимо найти зависимость скорости от момента двигателя. Это легко сделать, если учесть, что момент, Н∙м, развиваемый двигателем, связан с током якоря и магнит-
ным потоком простой зависимостью, а именно 1 :
Подставив в (3.3) значение тока I, найденное из (3.4), получим выражение для механической характеристики:
Коэффициент с принимается постоянным, не зависящим от нагрузки, если у двигателя с независимым возбуждением имеется компенсационная обмотка. Он может считаться неизменным, если для обычных двигателей пренебречь реакцией якоря.
Механическая характеристика двигателя при неизменных параметрах U, Ф и R представляется прямой линией. Ниже показано, что, изменяя тот или иной параметр механической характеристики, можно при определенном моменте сопротивления на валу двигателя получать различные скорости двигателя, т. е. регулировать скорость электропривода.
Здесь же рассмотрим влияние лишь одного параметра, а именно сопротивления якорной цепи, поскольку это необходимо для выяснения основных определений, связанных с понятием о механической характеристике для различных режимов работы двигателя.
На рис. 3.2 представлены механические характеристики двигателя независимого возбуждения для различных сопротивлений якорной цепи. Как видно из (3.5), при М = 0 все характеристики проходят через одну точку, лежащую на оси ординат. Угловая скорость в этой точке имеет вполне определенное значение, не зависящее от сопротивления якорной цепи. Эта скорость носит название
1  Приведенным уравнением определяется электромагнитный момент двигателя. Момент на валу двигателя будет меньше электромагнитного момента на значение, соответствующее потерям в стали и механическим потерям. Однако для практических расчетов можно пользоваться уравнениями механических характеристик, где приводится электромагнитный момент.
Приведенным уравнением определяется электромагнитный момент двигателя. Момент на валу двигателя будет меньше электромагнитного момента на значение, соответствующее потерям в стали и механическим потерям. Однако для практических расчетов можно пользоваться уравнениями механических характеристик, где приводится электромагнитный момент.
с к о р о с т и и д е а л ь н о г о х о л о с т о г о х о д а и определяется выражением
При скорости идеального холостого хода, когда ток в якорной цепи равен нулю, ЭДС якоря, направленная навстречу приложенному напряжению, равна ему по абсолютному значению. Если двигатель до приложения нагрузки работал с угловой скоростью ω0, то при появлении на его валу момента сопротивления угловая скорость будет снижаться. Следствием этого будет уменьшение ЭДC вращения Е согласно (3.2) и увеличение тока якоря в соответствии с (3.1) и момента двигателя по (3.4). Угловая
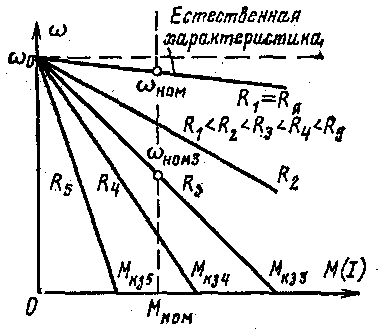
Рис. 3.2. Естественная характеристика и семейство реостатных механических характеристик двигателя постоянного тока независимого возбуждения.
скорость будет снижаться до тех пор, пока момент двигателя не сравняется с моментом сопротивления. Разность значений установившихся скоростей электропривода до и после приложения заданной статической нагрузки называется с т а т и ч е с к и м п а д е н и е м (перепадом) скорости элект ропривода.
Второй член (3.6) характеризует собой статическое падение угловой скорости (перепад) относительно угловой скорости идеального холостого хода:
Таким образом, уравнение для скорости двигателя может быть записано так:
Верхняя характеристика из семейства, приведенного на рис. 3.2, носит название естественной. Е с т е с т в е н —
ной характеристикой называется т акая характеристика двигателя, к о т о рая получается при отсутствии в н е ш них резисторов в якорной цепи и н оминальных значениях напряжения и магнитного потока двигателя. Жесткость естественной характеристики зависит от внутреннего сопротивления якорной цепи двигателя Rя. Внутреннее сопротивление якорной цепи включает собственное сопротивление якорной обмотки, сопротивление обмотки дополнительных полюсов, компенсационной обмотки и щеток. Соответственно перепад скорости для естественной характеристики
По (3.9) определяется статическое падение скорости для любой из характеристик двигателя независимого возбуждения, представленных на рис. 3.2. Например, при дополнительно включенном реостате, имеющем сопротивление Rр, статическое падение скорости определится из соотношения
Разделив (3.10) на ω0, получим статическое падение скорости в относительных единицах:
Статическое падение скорости в относительных единицах Δω* аналогично скольжению асинхронного двигателя, хотя скольжение для двигателей постоянного тока не имеет того физического смысла, как у асинхронных двигателей.
Если в якорную цепь двигателя включен дополнительный резистор (реостат), то механические характеристики, получаемые при этом, называются искусственными или реостатным и. Эти характеристики пересекаются все в одной точке ω0. Реостатные характеристики так же линейны, как и естественная характеристика, но имеют значительно больший наклон к оси моментов, т. е. обладают меньшей жесткостью. Чем больше введенное в цепь якоря сопротивление резистора, тем круче идет характеристика, тем меньше ее жесткость.
Электрический двигатель, в отличие от двигателей других типов, способен сам автоматически разгоняться до скорости установившегося режима работы, снижать скорость при увеличении момента сопротивления и из установившегося режима с большей скоростью переходить в установившийся режим с меньшей скоростью, увеличивать скорость при уменьшении момента сопротивления и переходить из установившегося режима с меньшей скоростью к установившемуся режиму с большей скоростью. Эта особенность электрического двигателя объясняется тем, что между скоростью вращения и вращающим моментом двигателя существует зависимость ω=f(М), в соответствии с которой с увеличением момента скорость уменьшается и наоборот. Называют эту зависимость механической характеристикой двигателя.
С помощью механической характеристики можно определить основные свойства электрического двигателя и проверить их соответствие требованиям технологической машины.
Оси абсцисс и ординат, по которым откладываются соответственно величины М и ω, разделяют плоскость на четыре квадрата. Первый номер принято присваивать верхнему правому квадрату, а остальные нумеровать против часовой стрелки.
В первом квадранте знаки М и ω, а значит и направление величин, совпадает. Поэтому в нём располагаются механические характеристики для двигательного режима работы электрической машины. Аналогичные характеристики для противоположного направления вращения располагаются и в третьем квадранте, так как знаки М и ω отрицательны.
Во втором квадранте скорость ω положительна, а момент М имеет отрицательный знак. Поэтому в нём располагаются механические характеристики, соответствующие режиму электрического торможения, когда под действием инерционных сил направление вращения сохраняется, а направление момента за счёт изменения схемы включения двигателя изменяется на противоположное. Аналогичные характеристики для противоположного направления вращения располагаются и в четвёртом квадранте, так как в нём ω имеет отрицательный знак, а М – положительный.
Схема включения двигателя постоянного тока (ДПТ) с независимым возбуждением приведена на рис. 2.1.
Якорь двигателя и обмотка возбуждения LM получает питание от независимых источников напряжения U и Uв. Поэтому ток в обмотке возбуждения Ів не зависит от тока якоря Ія. Мощность источника Uв не превышает 15% от мощности источника U.
При вращающемся якоре в его обмотке наводится э.д.с. вращения Е. На схеме включения двигателя направление Е встречно по отношению к направлению U, что соответствует двигательному режиму работы. Величина Е равна:
 ,
,
где ω – угловая скорость двигателя;
 |
Рис. 2.1 – Схема включения двигателя постоянного тока с независимым возбуждением
Ф –поток двигателя;
 – конструктивный коэффициент двигателя, данные, для расчёта которого приводятся в справочниках.
– конструктивный коэффициент двигателя, данные, для расчёта которого приводятся в справочниках.
Здесь р – число пар полюсов двигателя; N – число активных проводников обмотки якоря; а – число пар параллельных ветвей обмотки якоря.
Направление якорного тока Iя, как и направление Е, на схеме включения показано для двигательного режима работы.
Допустимое значение якорного тока двигателя Iя.доп. ограничивается условиями коммутации и механической прочностью якоря и не должно превышать номинальный ток Iя.н. более чем в 2,5 раза — Iя.доп. ≤ 2,5∙ Iя.н..
В соответствии с уравнением равновесия напряжений при установившемся режиме работы двигателя напряжение U, приложенное к якорной цепи двигателя, уравновешивается падением напряжения в якорной цепи IЯRЯЦ и наведённой в обмотке якоря э.д.с. вращения Е:
 ,
,
где  – суммарное сопротивление якорной цепи.
– суммарное сопротивление якорной цепи.
Здесь RЯ – сопротивление обмотки якоря; RДП – сопротивление обмотки дополнительных полюсов; RКО – сопротивление компенсационной обмотки; RП – сопротивление пускового реостата.
Величина IЯ в установившемся режиме будет равна:
 .
.
В режиме пуска Е=0, поэтому из–за небольшого сопротивления обмоток пусковой ток Iяп может превышать допустимое значение. Для ограничения пускового тока служит пусковой реостат, сопротивление которого Rп выбирается таким образом, чтобы IЯП ≤ Iя.доп..
 .
.
В цепи питания LM включён реостат с сопротивлением RВ. С его помощью уменьшается ток в обмотке возбуждения. В результате поток двигателя Ф ослабляется, становясь меньше номинального значения Ф≤Фн.
Из уравнения равновесия напряжений для якорной цепи можно получить аналитическое выражение для механической характеристики двигателя.
Подставив в него вместо э.д.с. вращения Е, её значение и решив полученное уравнение относительно скорости, получим зависимость скорости двигателя ω от тока якоря IЯ ω=f(IЯ), которая называется электромеханической характеристикой:
 .
.
Вращающий момент двигателя М связан с током якоря и магнитным потоком зависимостью М=кФIЯ. Подставив в уравнение электромеханической характеристики значения для тока IЯ=М/кФ, получим выражение для механической характеристики ω=f(М):
 или
или  ,
,
где с=кФ – коэффициент, принимаемый постоянным и не зависящим от тока якоря, если у двигателя имеется компенсационная обмотка или если реакцию якоря не учитывать.
При неизменных параметрах U, Ф, RЯЦ уравнение механической характеристики есть уравнение прямой линии.
В режиме идеального холостого хода Мс=0 и М=0, поскольку в установившемся режиме двигатель работает с М=Мс. Тогда
 ,
,
где ω0 –скорость идеального холостого хода.
При увеличении момента сопротивления скорость установившегося режима уменьшается на величину статического падения скорости Δωс, которое равно:
 .
.
Таким образом, уравнение для механической характеристики двигателя можно записать в следующем виде:
 .
.
Механическая характеристика двигателя, которая получается при отсутствии внешних сопротивлений в якорной цепи (RП=0) и номинальных значениях потока двигателя (Ф=Фн) и напряжения на якоре (U=Uн) называется естественной характеристикой. Следует отметить, что выполнение двух первых условий не вызывает трудностей. Третье условие (U=Uн) выполняется в том случае, если якорная цепь двигателя питается от источника бесконечной мощности или в замкнутой системе преобразователь-двигатель с обратной связью по напряжению преобразователя и астатическим регулятором напряжения.
Построить естественную характеристику, учитывая её линейность, можно по двум точкам – точке идеального холостого хода с координатами (М=0; ω=ω0) и точке, соответствующей номинальному режиму работы (М=Мн; ω=ωн). На основании паспортных данных двигателя (Рн, Uн, Ін, nн) можно найти:
 .
.
Естественная характеристика приведена на рис. 2.2.

Рис. 2.2 — Механические характеристики двигателя постоянного тока независимого возбуждения.
При скорости двигателя ток ω=ω0 ІЯ=0, так как э.д.с. вращения Е=U и направлена по отношению к нему встречно. Работать в двигательном режиме со скоростью ω=ω0 двигатель не может, так как даже при отсутствии нагрузки со стороны технологической машины трение в подшипниках и крыльчатка вентилятора создают момент сопротивления холостого хода Мсхх. Двигатель в установившемся режиме будет работать с М= Мсхх и ω=ωхх 0.
Найти величину ωхх можно, изобразив в одном квадрате с механической характеристикой двигателя механическую характеристику технологической машины. Если предположить, что Мс не зависит от скорости, то через точку с координатами (ω=0; М=Мсхх) необходимо провести вертикальную прямую до её пересечения с механической характеристикой двигателя (точка А). В точке А М=Мс, а её проекция на ось ординат равна ωхх.
При увеличении момента сопротивления от Мсхх до Мс=Мн появится отрицательный динамический момент МД
Благодаря тому, что в обмотке якоря наводится э.д.с. вращения Е, двигатель при увеличении Мс автоматически, снизив скорость вращения и увеличив вращающий момент, перешёл из установившегося режима с большей скоростью (ωх.х.в точке А) в установившийся режим с меньшей скоростью (ωн в точке В).
Статически падение скорости на естественной характеристике равно:
 .
.
Если сопротивление пускового реостата RП>0, то Δωс при одном и том же моменте двигателя будет больше, чем на естественной характеристике:
 .
.
Поскольку величина ω0 не зависит от величины RП, то получаемая в этом случае характеристика, которая называется искусственной или реостатной, будет начинаться в той же точке, что и естественная, но проходить с большим наклоном к оси абсцисс.
Якорный ток Iя и момент двигателя М связаны прямой пропорциональной зависимостью. Поэтому ограничение с помощью Rп пускового тока значением Iя.доп.≤2,5 Iян автоматически ограничивает и допустимое значение пускового момента Мдоп≤2,5Мн. Механическая характеристика на рис. 2.2 в этом случае пересекает ось абсцисс в точке с координатами (ω=0; М=Мдоп=2,5Мн) и называется предельной пусковой. Реостатные характеристики, расположенные выше получаются при меньших величинах RП. Запускаясь при Мс=Мн по предельной пусковой характеристике, двигатель разгонится до скорости ω1 и перейдёт в установившийся режим работы. Для увеличения скорости двигателя необходимо уменьшить величину RП.
Дата добавления: 2015-03-19 ; просмотров: 3012 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ

Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iв не зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид
где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).
Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными рисунок 13.13, а (график 1 Rдоб = 0 ).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными .
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:
где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.
На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Используемая литература: — Кацман М.М. Справочник по электрическим машинам






