Содержание
Крутящий момент на выходе редуктора
1 Крутящий момент на выходном валу редуктора M2 [Нм]
Крутящим моментом на выходном валу редуктора называется вращающий момент, подводимый к выходному валу мотор-редуктора, при установленной номинальной мощности Pn, коэффициенте безопасности S, и расчетном сроке службы 10000 часов, с учетом КПД редуктора.
2 Номинальный крутящий момент редуктора Mn2 [Нм]
Номинальным крутящим моментом редуктора называется максимальный крутящий момент, на безопасную передачу которого рассчитан редуктор, исходя из следующих величин:
. коэффициент безопасности S=1
. срок службы 10000 часов.
Величины Mn2 рассчитываются в соответствии со следующими стандартами:
ISO DP 6336 для шестерен;
ISO 281 для подшипников.
3 Максимальный вращающий момент M2max [Нм]
Максимальным вращающим моментом называется наибольший крутящий момент, выдерживаемый редуктором в условиях статической или неоднородной нагрузки с частыми пусками и остановками (это величина понимается как мгновенная пиковая нагрузка при работе редуктора или пусковой крутящий момент под нагрузкой).
4 Необходимый крутящий момент Mr2 [Нм]
Значение крутящего момента, соответствующее необходимым требованиям потребителя. Данная величина всегда должна быть меньше или равна номинальному значению выходного крутящего момента Mn2 выбранного редуктора.
5 Расчетный крутящий момент M c2 [Нм]
Значение крутящего момента, которым необходимо руководствоваться при выборе редуктора с учетом требуемого крутящего момента Mr2 и эксплуатационного коэффициента fs, вычисляется по формуле:
Мощность
1 Номинальная входная мощность Pn1 [кВт]
Значение данной величины, приведенное в таблицах выбора редукторов, соответствует допустимой входной мощности, передаваемой на входной вал редуктора при скорости n1, коэффициенте безопасности S=1 и расчетном сроке службы редуктора 10000 ч.
2 Выходная мощность P2 [кВт]
Полезная мощность, передаваемая на выходной вал редуктора, вычисляется по следующим формулам:
Значения динамического КПД редукторов указаны в таблице (A2)
Предельная термическая мощность Pt [кВт]
Данная величина равна предельному значению передаваемой редуктором механической мощности в условиях непрерывной работы при температуре окружающей среды 20°C без повреждения узлов и деталей редуктора. При температуре окружающей среды, отличной от 20°C, и прерывистом режиме работы значение Pt корректируется с учетом тепловых коэффициентов ft и коэффициентов скорости, приведенных в таблице (A1). Необходимо обеспечить выполнение следующего условия:
Относительная продолжительность включения (I)% равна процентному отношению времени работы под нагрузкой tf к сумме времени работы под нагрузкой и времени покоя tr:
Коэффициент полезного действия (КПД)
1 Динамический КПД [ηd]
Динамический КПД представляет собой отношение мощности, получаемой на выходном валу P2, к мощности, приложенной к входному валу P1.
Справочные значения КПД указаны в следующей таблице: (A2)
Передаточное число [ i ]
Характеристика, присущая каждому редуктору, равная отношению скорости вращения на входе n1 к скорости вращения на выходе n2:
Скорость вращения
1 Скорость на входе n1 [мин -1]
Скорость вращения, подведенная к входному валу редуктора. В случае прямого подсоединения к электродвигателю данное значение равно выходной скорости электродвигателя; в случае подсоединения через другие элементы привода для получения входной скорости редуктора скорость двигателя следует разделить на передаточное число подводящего привода. В этих случаях рекомендуется подводить к редуктору скорость вращения ниже 1400 об/мин. Не допускается превышение значений входной скорости редукторов, указанных в таблице.
2 Скорость на выходе n2 [мин-1]
Выходная скорость n2 зависит от входной скорости n1 и передаточного числа i; вычисляется по формуле:
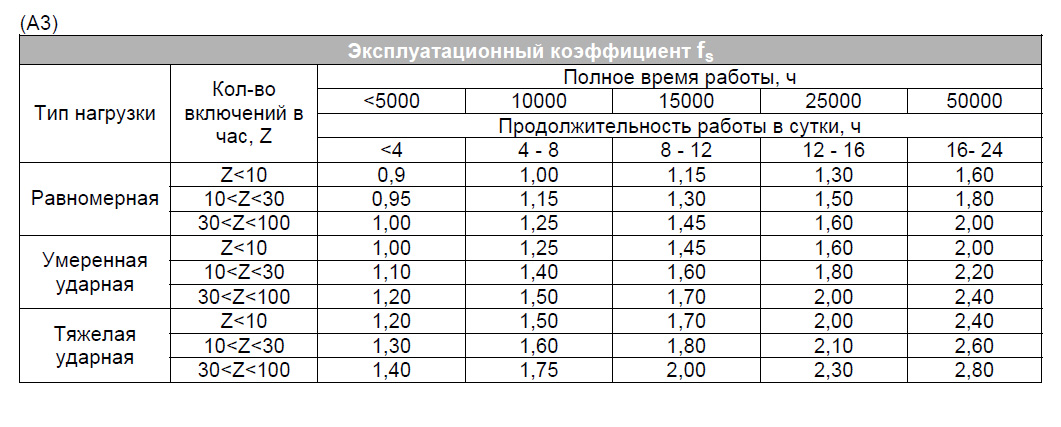
Эксплуатационный коэффициент fs
Эксплуатационный коэффициент является количественным показателем тяжести предполагаемых условий эксплуатации редуктора с приблизительным учетом продолжительности ежедневного цикла работы, изменений нагрузки и возможных перегрузок, связанных с особенностями конкретных условий эксплуатации изделия. Приблизительные значения эксплуатационного коэффициента даны в таблице (A3) ниже:
Коэффициент безопасности [S]
Значение коэффициента равно отношению номинальной мощности редуктора к реальной мощности электродвигателя, подсоединенного к редуктору:
Классификация редукторов в зависимости от расположения осей входного и выходного валов в пространстве.
Классификация редукторов в зависимости от способа крепления.


Конструктивные исполнения по способу монтажа.
Условные изображения и цифровые обозначения конструктивных исполнений редукторов и мотор-редукторов общемашиностроительного применения: (изделий) по способу монтажа установлены ГОСТ 30164-94.
В зависимости от конструкции редукторы и мотор-редукторы разбиты на следующие группы:
а) соосные;
б) с параллельными осями;
в) с пересекающимися осями;
г) со скрещивающимися осями.
К группе а) отнесены и изделия с параллельными осями, у которых концы входного и выходного валов направлены в противоположенные стороны, а их межосевое расстояние составляет не более 80мм.
К группам б) и в) отнесены также вариаторы и вариаторные приводы. Условные изображения и цифровые обозначения конструктивных исполнений по способу монтажа характеризуют конструктивные исполнения корпусов, а также расположение в пространстве поверхностей крепления валов или осей валов.
Условное обозначение изделий группы а) состоит из трех цифр:
Первая — конструктивное исполнение корпуса (1 – на лапах, 2 – с фланцем);
Вторая — расположение поверхности крепления (1 — пол, 2 – потолок, 3 – стена);
Третья – расположение конца выходного вала (1 – горизонтальный влево, 2 — горизонтальный вправо, 3 – вертикальный вниз, 4 — вертикальный верх).
Условное обозначение изделий группы а) состоит из трех цифр:
первая — конструктивное исполнение корпуса (1 — на лапах; 2 — с фланцем); вторая — расположение поверхности крепления (1 — пол; 2 — потолок; 3 — стена); третья — расположение конца выходного вала (1 — горизонтальный влево; 2 — горизонтальный вправо; 3 — вертикальный вниз; 4 — вертикальный вверх).
Условное обозначение изделий групп б) и в) состоит из четырех цифр:
первая — конструктивное исполнение корпуса (1 — на лапах; 2 — с фланцем; 3 — навесное; 4 — насадное); вторая — взаимное расположение поверхности крепления и осей валов для группы б): 1 — параллельно осям валов; 2 — перпендикулярно осям валов; для группы в): 1 — параллельно осям валов; 2 — перпендикулярно оси выходного вала; 3 — перпендикулярно оси входного вала); третья — расположение поверхности крепления в пространстве (1 — пол; 2 — потолок; 3 — стена левая, передняя, задняя; 4 — стена правая, передняя, задняя);
четвертая — расположение валов в пространстве для группы б): 0 — валы горизонтальные в горизонтальной плоскости; 1 — валы горизонтальные в вертикальной плоскости; 2 — валы вертикальные; для группы в): 0 — валы горизонтальные; 1 — выходной вал вертикальный; 2 — входной вал вертикальный).
Условное обозначение изделий группы г) состоит из четырех цифр:
первая — конструктивное исполнение корпуса (1 — на лапах; 2 — с фланцем; 3 — навесное; 4 — насадное);
вторая — взаимное расположение поверхности крепления и осей валов (1 — параллельно осям валов, со стороны червяка; 2 — параллельно осям валов, со стороны колеса; 3, 4 — перпендикулярно оси колеса; 5, 6 — перпендикулярно оси червяка);
третья — расположение валов в пространстве (1 — валы горизонтальные; 2 — выходной вал вертикальный: 3 — входной вал вертикальный);
четвертая — взаимное расположение червячной пары в пространстве (0 — червяк под колесом; 1 — червяк над колесом: 2 — червяк справа от колеса; 3 — червяк слева от колеса).
Изделия навесного исполнения устанавливают полым выходным валом, а корпус фиксируют в одной точке от проворота реактивным моментом. Изделия насадного исполнения устанавливают полым выходным валом, а корпус крепят неподвижно в нескольких точках.
В мотор-редукторах на изображении конструктивного исполнения по способу монтажа должно быть дополнительное упрощенное изображение контура двигателя по ГОСТ 20373.
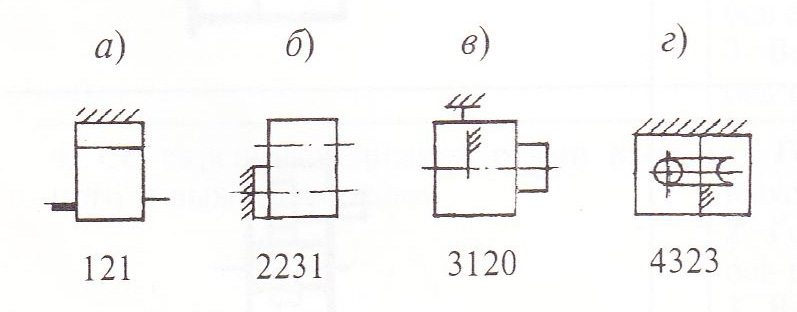
Примеры условных обозначений и изображений:
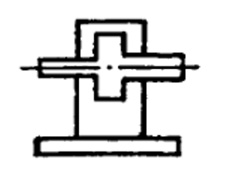
121 — соосный редуктор, конструктивное исполнение корпуса на лапах, крепление к потолку, валы горизонтальные, выходной вал слева (рис. 1, а);
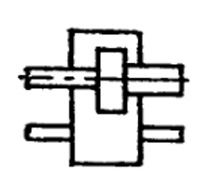
2231 — редуктор с параллельными осями, исполнение корпуса с фланцем, поверхность крепления перпендикулярна осям валов, крепление к левой стене, валы горизонтальные в вертикальной плоскости (рис. 1, б);
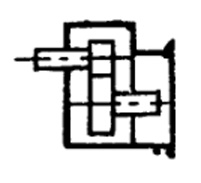
3120 — редуктор с пересекающимися осями, исполнение корпуса навесное, поверхность крепления параллельна осям валов, крепление к потолку, валы горизонтальные (рис. 1, в);
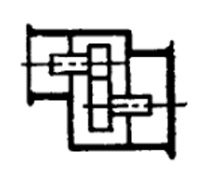
4323 — редуктор со скрещивающимися осями, исполнение корпуса насадное, поверхность крепления перпендикулярна оси колеса, выходной вал вертикальный, червяк слева от колеса (рис. 1, г). Символом LLLL обозначена точка фиксации изделия от проворота реактивным моментом и крепление полого выходного вала на валу рабочей машины.
ВАРИАНТЫ СБОРКИ.
В соответствии с ГОСТ 20373-94 редукторы и мотор-редукторы выполняют по одному из стандартных вариантов сборки, которые отличаются по количеству, взаимному расположению, форме и размерам выходных концов валов. Условные изображения и обозначения вариантов сборки по ГОСТ 20373 являются составной частью условных обозначений редукторов и мотор-редукторов общемашиностроительного применения, предназначенных для привода машин, механизмов и оборудования. Стандарт не распространяется на соосные зубчатые редукторы и мотор-редукторы и является рекомендуемым для специальных. Условные изображения и цифровые обозначения вариантов сборки редукторов и мотор-редукторов характеризуют взаимное расположение выходных концов валов и их число.

Условные изображения и цифровые обозначения вариантов сборки первой ступени относительно второй червячных и цилиндрическо-червячных двухступенчатых редукторов и мотор-редукторов должны соответствовать приведенным в табл.
Наши планетарные мотор-редукторы с диапазоном вращающего момента от 0,03 до 600 кг*см всегда гарантируют оптимальное соотношение мощности и занимаемого пространства.
Область применения приборных мотор-редукторов: средства автоматизации и системы управления, устройства регулирования, автоматические и автоматизированные системы управления, следящие мини-приводы, средства обработки и представления информации, специальные инструменты, медицинская техника.
Для управления коллекторными мотор-редукторами постоянного тока предназначен блок управления BMD и блок управления BMSD. Блок управляет скоростью и направлением двигателя, используется для плавного пуска и плавного торможения двигателя.
- Управление мотор-редукторами
- BMD
- BMSD

Планетарный мотор-редуктор

Цилиндрический мотор-редуктор

Червячный мотор-редуктор


























| Цилиндрические мотор-редукторы | |||||||
|---|---|---|---|---|---|---|---|
| Наименование | Напряжение питания, В | Мощность, Вт | Крутящий момент, кг*см | Скорость, об/мин | Рисунок | Производитель | |
| RA-12WGM | |
3;6 | 0,56; 0,61 | 0.03 — 0.7 | 46 — 1500 |  |
SHAYANG YE INDUSTRIAL |
| RA-20GM | |
12; 24 | 1.5; 1.7 | 0.16 — 1.80 | 8.6 — 720 |  |
SHAYANG YE INDUSTRIAL |
| RA-27GM | |
6; 12; 24 | 0,25 — 0,7 | 0,05 — 1,5 | 3,6 — 390 |  |
SHAYANG YE INDUSTRIAL |
| RB-35GM (11 и 12 типы) |
|
12; 24 | 3 | 0,5 — 6 | 2,0 — 490 |  |
SHAYANG YE INDUSTRIAL |
| RB-99WGM (01 и 02 типы) |
12; 24 | 12,8; 12,7 | 3-10 | 12-210 |  |
SHAYANG YE INDUSTRIAL | |
| RB-35GM (07 и 09 типы) |
|
12; 24 | 14 | 1 — 6 | 2 — 532 |  |
SHAYANG YE INDUSTRIAL |
| SF5539 | 24 | 40 | 1,4 | 13 — 800 |  |
KING RIGHT MOTOR | |
| SF6551 | 24 | 70 | 2,0 | 13 — 800 |  |
KING RIGHT MOTOR | |
| SF7152 | 24 | 150 | 3,9 | 15 — 910 |  |
KING RIGHT MOTOR | |
| SF8156 | 24 | 250 | 6,6 | 10 — 610 |  |
KING RIGHT MOTOR | |
| Червячные мотор-редукторы | |||||||
|---|---|---|---|---|---|---|---|
| Наименование | Напряжение питания, В | Мощность, Вт | Крутящий момент, кг*см | Скорость, об/мин | Рисунок | Производитель | |
| WG3929 | 12 / 24 | 19 | 0,45 | 30 — 84 |  |
KING RIGHT MOTOR | |
| WG5539 | 12 / 24 | 38 | 1,2 | 40 |  |
KING RIGHT MOTOR | |
| WG5946 | 12 | 67 | 1,9 | 80 — 240 |  |
KING RIGHT MOTOR | |
| WG6551R&L | 24 | 70 | 1,5 | 54 |  |
KING RIGHT MOTOR | |
| WG7152 | 24 | 132 | 2,8 | 49 — 245 |  |
KING RIGHT MOTOR | |
| WG7165 | 12 | 200 | 5,4 | 52 — 262 |  |
KING RIGHT MOTOR | |
| WG7185 | 24 | 240 | 5,7 | 64 — 322 |  |
KING RIGHT MOTOR | |
| WG1188 | 24 | 600 | 20,3 | 34 — 202 |  |
KING RIGHT MOTOR | |
Планетарные мотор-редукторы KING RIGHT MOTOR серий PT4835,а так же червячные мотор-редукторы KRM серий WG3929, WG5539, WG5946, WG7152, WG7165, WG7185 могут быть укомплектованы оптическим энкодером.
Мотор-редукторы производства KING RIGHT MOTOR серий PT4835, WG5539, WG5946, WG6551, WG7152, WG7165, WG7185 могут быть укомплектованы электромагнитным тормозом.
Цена мотор-редукторов KING RIGHT MOTOR не зависит от передаточного отношения установленного редуктора.
Электрическими микромашинами принято называть машины мощностью от долей ватта до нескольких десятков ватт. Обычно питание такого рода электродвигателей 12В, 24В или 27В. Эти двигатели находят широкое применение в системах автоматики, телемеханики, в вычислительной технике, выполняя различные, порой уникальные функции.
Электрические микромашины отличаются от машин средней и большой мощности не только малыми размерами. Для них характерны:
- очень широкие диапазоны частоты вращения (от одного оборота в сутки для двигателя с редуктором до нескольких десятков тысяч оборотов в минуту),
- иное соотношение активных и индуктивных сопротивлений обмоток (часто R > X),
- относительно большое значение тока холостого хода (до 90 %),
- мало или практически совсем не насыщенные магнитные цепи,
- значительно меньшие потери в стали по сравнению с потерями в обмотках,
- малое число пазов и, следовательно, плохой гармонический состав магнитного поля в зазоре,
- большие плотности тока в обмотках,
- низкие и даже очень низкие энергетические показатели.
Есть и другие отличительные особенности, как в вопросах технологии производства, теории проектирования, так и в свойствах и функциях, выполняемых микромашинами. Вместе с тем, когда не требуется прецизионное позиционирование, а только управление скоростью, коллекторный двигатель постоянного тока с редуктором является наиболее экономичным решением, поскольку, в отличие от шаговых двигателей, не требует сложных схем управления. Это очень важно, так как стоимость схемы управления шаговым двигателем сопоставима со стоимостью самого двигателя. Несмотря на скромные габариты уровень вращающего момента и допустимые скорости вращения впечатляюще высоки. Двигатели с редукторами производства SHAYANG YE INDUSTRIAL могут комплектоваться встроенными энкодерами — датчиками Холла, мотор-редукторы KING RIGHT MOTOR — оптическими энкодерами и электромагнитными тормозами. Кроме уникального разнообразия типоразмеров и передаточных чисел наши мотор-редукторы обеспечивают исключительную надежность, высокую нагрузочную способность и долговечность — результат многолетнего опыта в серийном производстве. Две с половиной тысячи комбинаций модульной системы обеспечивают полную свободу выбора, каким бы ни был способ крепления и интеграции в приводную систему. Такое исключительное разнообразие вариантов задает новые масштабы в этой области приводной техники.
Полный каталог поставляемых мотор-редукторов SHAYANG YE INDUSTRIAL — gearmotor.pdf
Чтобы подобрать и купить мотор-редукторы постоянного тока обратитесь в офисы продаж нашей компании.
Продажа мотор-редукторов осуществляется организациям, имеющим регистрацию на территории Российской Федерации.
В данной статье содержится подробная информация о выборе и расчете мотор-редуктора. Надеемся, предлагаемые сведения будут вам полезны.

При выборе конкретной модели мотор-редуктора учитываются следующие технические характеристики:
- тип редуктора;
- мощность;
- обороты на выходе;
- передаточное число редуктора;
- конструкция входного и выходного валов;
- тип монтажа;
- дополнительные функции.
Тип редуктора
Наличие кинематической схемы привода упростит выбор типа редуктора. Конструктивно редукторы подразделяются на следующие виды:
- Червячный одноступенчатый со скрещенным расположением входного/выходного вала (угол 90 градусов).
- Червячный двухступенчатый с перпендикулярным или параллельным расположением осей входного/выходного вала. Соответственно, оси могут располагаться в разных горизонтальных и вертикальных плоскостях.
- Цилиндрический горизонтальный с параллельным расположением входного/выходного валов. Оси находятся в одной горизонтальной плоскости.
- Цилиндрический соосный под любым углом. Оси валов располагаются в одной плоскости.
- В коническо-цилиндрическом редукторе оси входного/выходного валов пересекаются под углом 90 градусов.
Важно! Расположение выходного вала в пространстве имеет определяющее значение для ряда промышленных применений.
- Конструкция червячных редукторов позволяет использовать их при любом положении выходного вала.
- Применение цилиндрических и конических моделей чаще возможно в горизонтальной плоскости. При одинаковых с червячными редукторами массо-габаритных характеристиках эксплуатация цилиндрических агрегатов экономически целесообразней за счет увеличения передаваемой нагрузки в 1,5-2 раза и высокого КПД.
Таблица 1. Классификация редукторов по числу ступеней и типу передачи






