 На шильдике (информационной табличке) любого асинхронного двигателя, кроме других рабочих параметров, указан такой его параметр как косинус фи — Cosфи. Косинус фи иначе называется коэффициентом мощности асинхронного двигателя.
На шильдике (информационной табличке) любого асинхронного двигателя, кроме других рабочих параметров, указан такой его параметр как косинус фи — Cosфи. Косинус фи иначе называется коэффициентом мощности асинхронного двигателя.
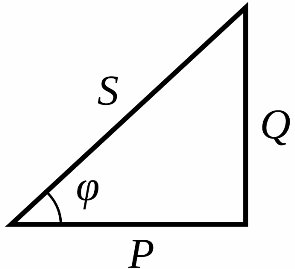
Почему этот параметр называется косинусом фи, и какое отношение он имеет к мощности? Все довольно просто: фи — это разность фаз между током и напряжением, и если изобразить графически активную, реактивную и полную мощности, имеющие место при работе асинхронного двигателя (трансформатора, индукционной печи и т. д.), то окажется, что отношение активной мощности к полной мощности — это и есть косинус фи — Cosфи, или другими словами — коэффициент мощности.
При номинальном напряжении питания и при номинальной нагрузке на валу асинхронного двигателя, косинус фи или коэффициент мощности как раз и будет равен тому значению, которое указано на его шильдике.

Например, для двигателя АИР71А2У2 коэффициент мощности будет равен 0,8 при нагрузке на валу 0,75 кВт. Но КПД этого двигателя равен 79%, следовательно потребляемая двигателем активная мощность при номинальной нагрузке на валу окажется больше 0,75 кВт, а именно 0,75/КПД = 0,75/0,79 = 0,95 кВт.
Тем не менее, при номинальной нагрузке на валу, параметр коэффициент мощности или Cosфи связан именно с потребляемой из сети энергией. Значит полная мощность данного двигателя окажется равна S = 0,95/Cosфи = 1,187 (КВА). Где P = 0,95 – потребляемая двигателем активная мощность.
При этом коэффициент мощности или Cosфи связан с нагрузкой на валу двигателя, поскольку при разной механической мощности на валу — разной будет и активная составляющая тока статора. Так, в режиме холостого хода, то есть когда к валу ничего не присоединено, коэффициент мощности двигателя не превысит, как правило, значения 0,2.
Если же нагрузку на валу начать увеличивать, то активная составляющая тока статора также будет расти, следовательно коэффициент мощности возрастет, и при близкой к номиналу нагрузке окажется равным примерно 0,8 — 0,9.
Если теперь нагрузку продолжить увеличивать, то есть нагружать вал сверх номинала, то ротор будет тормозиться, возрастет величина скольжения s, индуктивное сопротивление ротора станет вносить свой вклад, и коэффициент мощности начнет уменьшаться.
Если двигатель определенную часть рабочего времени работает вхолостую, то можно прибегнуть к снижению подводимого напряжения, например переключением с треугольника на звезду, тогда фазное напряжение на обмотках уменьшится в корень из 3 раз, снизится индуктивная составляющая от крутящегося вхолостую ротора, а активная составляющая в обмотках статора немного возрастет. Коэффициент мощности таким образом немного повысится.

Вообще, системы, питающиеся переменным током, такие как асинхронные двигатели, всегда обладают кроме активной еще и индуктивной и емкостной составляющими, поэтому каждые пол периода в сеть возвращается какая-то определенная часть энергии, называемая реактивной мощностью Q.
Этот факт вызывает у поставщиков электроэнергии проблемы: генератор вынужден поставлять в сеть полную мощность S, которая к генератору возвращается, но провода то все равно требуются соответствующего сечения под эту полную мощность, и, конечно, возникает паразитный нагрев проводов от циркулирующего туда-сюда реактивного тока. Получается, что генератор обязан поставлять полную мощность, часть которой в принципе является бесполезной.
В чисто активной форме генератор электростанции мог бы поставить потребителю гораздо больше электроэнергии, а для этого необходимо, чтобы коэффициент мощности был бы близок к единице, то есть как при чисто активной нагрузке, у которой Cosфи = 1.
Для обеспечения таких условий некоторые крупные предприятия устанавливают у себя на территории установки компенсации реактивной мощности, то есть системы из катушек и конденсаторов, которые автоматически подключаются параллельно асинхронным двигателям когда коэффициент их мощности снижается.
Получается, что реактивная энергия циркулирует между асинхронным двигателем и данной установкой, а не между асинхронным двигателем и генератором на электростанции. Так коэффициент мощности асинхронных двигателей доводят почти до 1.
1. Виды электродвигателей
Наибольшее распространение имеет трехфазный асинхронный электродвигатель. Электродвигатели постоянного тока и синхронные применяются редко.
Большинство электрифицированных машин нуждаются в приводе мощностью от 0,1 до 10 кВт, значительно меньшая часть — в приводе мощностью в несколько десятков кВт. Как правило, для привода рабочих машин используются короткозамкнутые трехфазные электродвигатели. По сравнению с фазным такой электродвигатель имеет более простую конструкцию, меньшую стоимость, большую надежность в эксплуатации и простоту в обслуживании, несколько более высокие эксплутационные показатели (коэффициент мощности и коэффициент полезного действия), а при автоматическом управлении требует простой аппаратуры. Недостаток короткозамкнутых электродвигателей — относительно большой пусковой ток. При соизмеримости мощностей трансформаторной подстанции и электродвигателя его пуск сопровождается заметным снижением напряжения сети, что усложняет как пуск самого двигателя, так и работу соседних токоприемников.
Наряду с трехфазными асинхронными короткозамкнутыми электродвигателями основного исполнения применяются также отдельные модификации этих двигателей: с повышенным скольжением, многоскоростные, с фазным ротором, с массивным ротором и т. д. Электродвигатели с фазным ротором применяют и в тех случаях, когда мощность питающей сети недостаточна для пуска двигателя с короткозамкнутым ротором.
Механические характеристики асинхронных электродвигателей с короткозамкнутым ротором в значительной мере зависят от формы и размеров пазов ротора, а также от способа выполнения роторной обмотки. По этим признакам

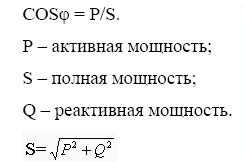
Рис. 1. Кривые моментов M = f(S) асинхронных электродвигателей
различают электродвигатели с нормальным ротором (нормальная беличья клетка), с глубоким пазом и с двумя клетками на роторе. Конструкция ротора короткозамкнутых асинхронных электродвигателей общего назначения мощностью свыше 500 Вт предопределяет явление вытеснения тока в обмотке, эквивалентно увеличению ее активного сопротивления. Поэтому, а также вследствие насыщения магнитных путей потоков рассеивания такие электродвигатели (в первую очередь обмотки ротора) обладают переменными параметрами и аналитические выражения их механических характеристик усложняются. Увеличение активного сопротивления ротора в период пуска вызывает увеличение начального пускового момента при некотором снижении силы начального пускового тока (рис. 1).
2. Основные характеристики электродвигателей
Номинальный режим электродвигателя соответствует данным, указанным на его щитке (паспорте). В этом режиме двигатель должен удовлетворять требованиям, установленным ГОСТом.
Существует восемь различных режимов работы, из них основными можно считать:
· продолжительный номинальный режим;
· кратковременный номинальный режим с длительностью рабочего периода 10, 30 и 90 мин;
· повторно-кратковременный номинальный режим с продолжительностью включения (ПВ) 15, 25, 40, 60%, с продолжительностью одного цикла не более 10 мин.
Номинальной мощностью Рн электродвигателя называется указанная на щитке полезная механическая мощность на валу при номинальном режиме работы. Номинальная мощность выражается в Вт или кВт.
Номинальная частота вращения nн вала электродвигателя называется указанное на щитке число оборотов в минуту, соответствующее номинальному режиму.
Номинальный момент вращения — момент, развиваемый двигателем на валу при номинальной мощности и номинальной частоте вращения:

Мн — номинальный момент вращения, Н·м (1 кгс·м = 9,81 Н·м ≈ 10 Н·м);
Рн — номинальная мощность, кВт;
nн — номинальная частота вращения, об/мин.
Номинальный к.п.д. hн электродвигателя — отношение его номинальной
мощности к мощности, потребляемой им из сети при номинальном напряжении:

Рн — номинальная мощность, кВт;
Uн — номинальное (линейное) напряжение, В;
Iн — номинальная сила тока, А;
cosφн — номинальный коэффициент мощности.
Номинальной силой тока электродвигателя называется сила тока, соответствующая номинальному режиму. Действительное значение силы тока при номинальном режиме может отличаться от указанного на щитке электродвигателя в пределах установленных допусков для к.п.д. и коэффициента мощности.
Максимальный вращающий момент электродвигателя — наибольший вращающий момент, развиваемый при рабочем соединении обмоток и постепенном повышении момента сопротивления на валу сверх номинального при условии, что напряжение на зажимах двигателя и частота переменного тока остаются неизменными и равными номинальным значениям.
Начальный пусковой вращающий момент электродвигателя — момент вращения его при неподвижном роторе, номинальных значениях напряжения и частоты переменного тока и рабочем соединении обмоток.
Минимальным вращающим моментом электродвигателя в процессе пуска называется наименьший вращающий момент, развиваемый двигателем при рабочем соединении обмоток и частоте вращения в пределах от нуля до значения, соответствующего максимальному вращающему моменту (напряжение на зажимах двигателя и частота переменного тока должны оставаться неизменными и равными их номинальным значениям).
Номинальная частота вращения вала электродвигателя является следующим за мощностью параметром, от которого в значительной мере зависят конструктивное оформление, габариты, стоимость и экономичность работы электропривода. Наиболее приемлемыми в диапазоне мощностей от 0,6 до 100 кВт являются частоты вращения 3000, 1500 и 1000 об/мин (синхронные). Электродвигатели с частотой вращения 750 об/мин (восьмиполюсные) малых мощностей имеют низкие энергетические показатели. При одинаковой мощности электродвигатели с более высокой частотой вращения имеют более высокие значения к.п.д. и cosφ, а также меньшие размеры и массу, что определяет их меньшую стоимость.
Сила тока холостого хода I0 в значительной мере определяется силой намагничивающего тока I0Р. приближенно можно считать I0 = I0P . Для машин
основного исполнения относительное значение силы тока холостого хода
I0 = (0,2—0,6)Iн (оно тем больше, чем меньше номинальная частота вращения и мощность электродвигателя). Зависимость тока холостого хода от частоты вращения электродвигателя приведена в таблице 2.1.
Таблица 2.1. Токи холостого хода для двигателей основного исполнения
Среднее значение токов холостого хода
(в долях от силы номинального тока) при синхронной частоте вращения, об/мин
Коэффициент полезного действия электродвигателя
где p ∑ – суммарные потери мощности; P 1 – потребляемая асинхронным двигателем (его статорной обмоткой) активная электрическая мощность; P 2 – полезная механическая мощность (снимаемая с вала двигателя).
КПД современных асинхронных двигателей при номинальной нагрузке для машин мощностью свыше 100 кВт составляет 0,92 − 0,96, мощностью 1 − 100 кВт – 0,7 − 0,9, а микромашин – 0,4 − 0,6 (большие значения относятся к машинам большей мощности).
Так же, как в трансформаторе, потери мощности асинхронного двигателя следует разделить на потери постоянные и переменные (или потери холостого хода и короткого замыкания). Постоянные потери не зависят от нагрузки. Это потери магнитные, механические, электрические холостого хода.
Магнитные потери определяются аналогично магнитным потерям трансформатора с помощью формулы Штейнметца:
где p 1,0/50 – удельные потери в стали на единицу массы при частоте 50 Гц и индукции 1,0 Тл; B – индукция на участке магнитопровода; G c – масса
сердечника (магнитопровода) или его участка.
Частота перемагничивания в роторе f 2 = f 1 s в рабочем режиме двигателя существенно меньше частоты магнитной индукции в статоре; масса магнитопровода ротора также меньше аналогичной массы статора. Обычно в практических расчетах асинхронных двигателей общепромышленного применения пренебрегают магнитными потерями в роторе.
Механические потери p мх состоят из потерь в подшипниках p подш , потерь на трение щеток о кольца p тр.щ (только для фазного ротора), вентиля-

5. Асинхронные машины
ционных потерь p вент , включающих в себя потери на трение частей машины о воздух и потери в крыльчатке вентилятора, установленной на валу машины:
р мх = р подш + р вент + р тр.щ .
Механические потери зависят только от частоты вращения и составляют не более 2 % от номинальной мощности машины. Поскольку частота вращения асинхронного двигателя при изменении нагрузки от нуля до номинальной изменяется мало, то механические потери считают постоянными.
В отличие от трансформатора в асинхронном двигателе учитывают электрические потери холостого хода, поскольку ток холостого хода в нем существенно больше, чем в трансформаторе, и составляет от 20 до 50 % от номинального тока (причины такого значения I 0 объяснены в п. 5.1):
Таким образом, потери холостого хода
р 0 = р мх + р мг + р эл0 .
К потерям переменным (короткого замыкания) относят электрические потери в обмотках статора и ротора:
р эл 1 = m 1 r 1 I 1 2 ; р эл 2 = m 1 r 2 ′ ( I 2 ′ ) 2 .
К переменным потерям относят и добавочные потери, вызванные различными причинами: неравномерностью зазора, технологическими погрешностями, вытеснением тока в проводниках обмотки, пульсациями магнитного потока и т. д. Обычно эти потери рассчитывают как определенный процент от номинальной мощности по формуле (5.73).
Итак, переменные потери, как следует из формул (5.120), (5.73), зависят от второй степени тока или второй степени коэффициента нагрузки k нг = I / I н (отношения тока текущей нагрузки к номинальному его значению):
p к = p эл2 + p д = m 1 r к ( I 2 ′ ) 2 + ( I I н ) 2 p д = k нг 2 р кн ,
где p кн – потери короткого замыкания при номинальном токе.
Таким образом, суммарные потери мощности можно представить в следующем виде:
p Σ = p 0 + p к = p 0 + k нг 2 p кн .
5. Асинхронные машины
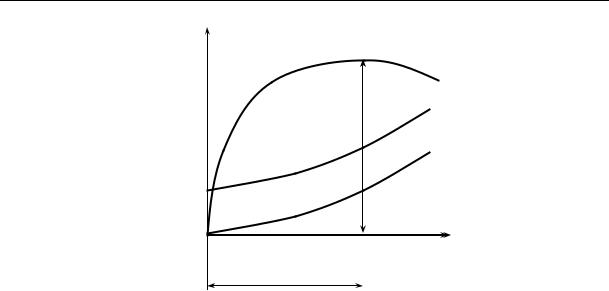
Рис. 5.23. Зависимость КПД двигателя и его потерь от коэффициента нагрузки
Формулу (5.115) запишем с учетом выражения (5.122):
Характер зависимости КПД от коэффициента нагрузки такой же, как
и у трансформатора. При увеличении нагрузки КПД возрастает за счет уве-
личения Р 2 , но одновременно быстрее, чем Р 2 , возрастают переменные потери р к , поэтому при некотором токе I кр рост КПД прекращается и в дальнейшем начинает уменьшаться (рис. 5.23). Если исследовать функцию
(5.123) на экстремум (взять производную dη/d k нг и приравнять ее к нулю), то получим условие максимума КПД: он наступает при равенстве переменных
и постоянных потерь р к = р 0 . При проектировании электрической машины стремятся так распределить потери мощности, чтобы указанное условие выполнялось при наиболее вероятной нагрузке машины, несколько мень-
шей номинальной. Во вращающихся электрических машинах средней и большой мощности это условие выполняется при нагрузках 60 − 80 % от номинальной (коэффициент нагрузки k нг = 0,6 − 0,8). На рис. 5.23 приведены зависимости изменения КПД и потерь мощности от коэффициента нагрузки.
Коэффициент мощности асинхронной машины определяют как отношение активного тока к полному току или активной потребляемой мощности к полной мощности по выражению

5. Асинхронные машины
Рис. 5.24. Характеристика
Рис. 5.25. Зависимости тока
роторной обмотки и cos ψ 2
Асинхронный двигатель, так же как и трансформатор, независимо от нагрузки потребляет из сети отстающий ток, поэтому его cos φ 1 всегда меньше единицы.
При холостом ходе асинхронного двигателя коэффициент мощности мал и составляет cos φ 0 = 0,08 − 0,15 (рис. 5.24). Это объясняется малой величиной активной составляющей тока, идущего на покрытие лишь достаточно небольших потерь активной мощности. В то же время реактивная составляющая тока холостого хода сравнительно велика, поскольку потребляется двигателем для создания основного магнитного потока, практически не зависящего от нагрузки. При увеличении нагрузки cos φ 1 сначала довольно быстро растет при увеличении момента на валу, затем рост его замедляется и достигает максимума при мощности, близкой к номинальной (рис. 5.24). Но при увеличении момента уменьшается частота вращения и растет скольжение. При этом увеличивается частота тока в роторе f 2 = f 1 s , его индуктивное сопротивление. Снижается и cos φ 1 , как правило, при нагрузках, выше номинальных.
Вследствие массового использования асинхронных двигателей для рационального электроснабжения предприятий следует так организовывать технологический процесс, чтобы асинхронные двигатели были загружены в соответствии сихноминальной мощностью инеработали нахолостомходу.
Величина коэффициента мощности для двигателей с короткозамкнутым ротором мощностью до 100 кВт достигает 0,7 − 0,9, а для двигателей свыше 100 кВт cos φ 1 = 0,9 − 0,95. В двигателях с фазным ротором cos φ 1 и КПД несколько ниже, что объясняется дополнительными потерями на трение щеток, худшим использованием объема ротора из-за наличия изоляции в его пазах и увеличением намагничивающего тока в результате уменьшения сечения зубцов ротора.






