Содержание

Есть два похода к настройке ПИД регулятора. Первый – синтез регулятора, то есть вычисление параметров регулятора на основании модели системы. Данный метод позволяет очень точно рассчитать параметры регулятора, но он требует основательного погружения в ТАУ.
Второй метод – ручной подбор параметров (коэффициентов). Это метод научного тыка проб и ошибок. Берем готовую систему, меняем один (или сразу несколько коэффициентов) регулятора, включаем регулятор и смотрим за работой системы. В зависимости от того, как ведет себя система с выбранными коэффициентами (недо/пере регулирование) опять меняем коэффициенты и повторяем эксперимент. И т. д. Ну, такой метод имеет право на жизнь, главное представлять как изменение того или иного коэффициента повлияет на систему (что бы не действовать совсем наугад).
Есть более «оптимизированный» метод подбора коэффициентов – метод Зиглера–Никольса.
Сразу скажу, что метод работает не для любой системы, результаты получаются не самыми оптимальными. Но, зато, метод очень простой и годится для базовой настройки регулятора в большинстве систем.
Суть метода состоит в следующем:
1. Выставляем все коэффициенты (Kp, Ki, Kd) в 0.
2. Начинаем постепенно увеличивать значение Kp и следим за реакцией системы. Нам нужно добиться, чтобы в системе начались устойчивые колебания (вызванные перерегулированием). Увеличиваем Kp, пока колебания системы не стабилизируются (перестанут затухать).
3. Запоминаем текущее значение Kp (обозначим его Ku) и замеряем период колебаний системы (Tu).
Все. Теперь используем полученные значения Ku и Tu для расчета всех параметров ПИД регулятора по формулам:
Kp = 0.6 * Ku
Ki = 2 * Kp / Tu
Kd = Kp * Tu / 8
Готово. Для дискретных регуляторов нужно еще учесть период дискретизации – T ( умножить на Ki та Т, разделить Kd на Т).
Еще раз повторюсь, ТАУ изучать нужно, синтез регуляторов рулит, описанный метод годится для базовой настройки, подходит не для всех систем и т. д. Но данный метод очень простой, и вполне годится для «бытового» уровня.
Параметры настройки регуляторов должны быть выбраны такими, чтобы в замкнутой автоматизированной системе регулирования (АСР) был обеспечен заданный запас устойчивости; при этом выбранный показатель качества регулирования должен быть не хуже требуемого (или должен иметь экстремальное значение).
Поскольку в теории автоматического регулирования запас устойчивости может быть оценен по-разному, а также используются различные показатели качества регулирования, в инженерных расчетах применяются несколько методов определения оптимальных параметров настройки регуляторов.
Ниже рассмотрены наиболее распространенные из них.
Формульный метод определения настроек регулятора
В практике наладочных работ широко используют приближенные формулы для определения оптимальных параметров настройки регуляторов. Метод используется для быстрой, приближенной оценки значений параметров настройки регулятора для трех видов оптимальных типовых процессов регулирования. Метод применим как для статических объектов с самовыравниванием (таблица 1), так и для объектов без самовыравнивания (таблица 2).
Таблица 1 — Формульный метод определения настроек регулятора для статических объектов с самовыравниванием.
| Регулятор | Типовой процесс регулирования | ||
| Апериодический | С 20% перерегулированием | Jmin | |
| И |  |
 |
|
| П |  |
 |
 |
| ПИ |  |
 |
 |
| ПИД |  |
 |
 |
где T, τ, Коу — постоянная времени, запаздывание и коэффициент усиления объекта. В этих формулах предполагается, что настраивается регулятор с зависимыми настройками, передаточная функция которого имеет вид:

 , (3)
, (3)
где Kp – коэффициент усиления регулятора;
Tи – постоянная интегрирования регулятора;
Tд – постоянная дифференцирования.
Таблица 2 – Формульный метод определения настроек регулятора для статических объектов без самовыравнивания.
| Регулятор | Типовой процесс регулирования | ||
| Апериодический | С 20% перерегулированием |  |
|
| П |  |
 |
— |
| ПИ |  |
 |
 |
| ПИД |  |
 |
 |
Оптимальная настройка регуляторов по номограммам
В отличие от формульного метода, метод расчета по номограммам позволяет более точно определить настройки регулятора, т.к. учитывает наличие нелинейной зависимости между параметрами настройки регулятора и величиной отношения τ/Т.
Существуют номограммы для расчета настроек ПИ- и ПИД-регуляторов для объектов первого и второго порядков с запаздыванием.
Номограмма для настроек ПИ-регулятора представлена на рисунке 12.

Рис. 12 – Номограмма для расчета настроек ПИ-регулятора.
Предположим, что объект управления описывается звеном первого порядка с запаздыванием, а оптимальный процесс регулирования – это процесс с 20%-ным перерегулированием. Следует иметь в виду, что современные электронные и микропроцессорные регуляторы реализуют ПИ- и ПИД-законы регулирования с зависимыми настройками, а пневматические регуляторы – с независимыми настройками вида
 . (4)
. (4)
Дифференциальная составляющая промышленных регуляторов обычно реализуется в виде
 , (5)
, (5)
где Kpд – коэффициент усиления регулятора по дифференциальной составляющей (выбирается в диапазоне 1 – 10);
Tf – постоянная времени фильтра.
Эти параметры определяются из соотношения
 . (6)
. (6)
Чем выше уровень помех в выходном сигнале объекта, тем меньше рекомендуется брать величину Kpд. Это будет способствовать уменьшению величины средней квадратичной ошибки регулирования.
Расчет настроек по частотным характеристикам объекта
Существует специальная аппаратура для экспериментального определения амплитудно-фазовой характеристики АФХ объекта управления. Эту характеристику можно использовать для расчета настроек ПИ-регулятора, где главным критерием является обеспечение заданных запасов устойчивости в системе.
Запасы устойчивости удобно характеризовать показателем колебательности системы M, величина которого в системе с ПИ- регулятором совпадает с максимумом амплитудно-частотной характеристики замкнутой системы. Для того чтобы этот максимум не превышал заданной величины, АФХ разомкнутой системы не должна заходить внутрь окружности с центром P0 и радиусом R, где
 ,
,  . (7)
. (7)
Можно доказать, что оптимальными, по минимуму среднеквадратичной ошибки регулирования настройками будут такие, при которых система с показателем колебательности М ≤ Мз будет иметь наибольший коэффициент при интегральной составляющей, чему соответствует условие Kp / Tи → min.
В связи с этим расчет оптимальных настроек состоит из двух этапов:
1. Нахождение в плоскости параметров Kp и Tи границы области, в которой система обладает заданным показателем колебательности Мз.
2. Определением на границе области точки, удовлетворяющей требованию Kp / Tи → min.
Методика расчета настроек ПИ регулятора по АФХ объекта
1. Строится семейство амплитудно-фазовых характеристик разомкнутой системы при Kp = 1 и различных значениях Tij (5-6 значений).
 . (8)
. (8)
2. Задаются значением показателя колебательности M, из диапазона 1.55 ≤ M ≤ 2.3 (рекомендуется М = 1.6). Из начала координат проводят прямую OE под углом
 , (9)
, (9)
где Мз — выбранное значение показателя колебательности.
3. Строится семейство окружностей, касающихся АФХ0j прямой OE под углом β, причем центр окружностей все время лежит на отрицательной действительной оси. В результате построения определяются радиусы этих окружностей Rj.
4. Для каждой окружности вычисляют предельное значение Kp .
5. По значениям Kpj и Kij строят границу области заданного показателя колебательности.
6. На этой границе определяют точку, для которой отношение Kp / Tи максимально.
Существует упрощенная методика настройки ПИ-регулятора по одной точке АФХ разомкнутой системы. В основу методики положен следующий факт. В результате экспериментов и численных расчетов было установлено, что для различных типов объектов управления при оптимально настроенном ПИ-регуляторе АФХ разомкнутых систем проходят приблизительно через одну точку с амплитудой Ap = 0.8, фазой φp = — 2.62 rad = — 150° и частотой ωp.
Экспериментальные методы настройки регулятора
Для значительного числа промышленных объектов управления отсутствуют достаточно точные математические модели, описывающие их статические и динамические характеристики. В то же время, проведение экспериментов по снятию этих характеристик весьма дорого и трудоемко. Экспериментальный метод настройки регуляторов не требуют знания математической модели объекта. Однако предполагается, что система смонтирована и может быть запущена в работу, а также существует возможность изменения настроек регулятора.
Таким образом, можно проводить некоторые эксперименты по анализу влияния изменения настроек на динамику системы. В конечном итоге гарантируется получение хороших настроек для данной системы регулирования. Существуют два метода настройки — метод незатухающих колебаний (метод Циглера и Никольса) и метод затухающих колебаний.
Метод незатухающих колебаний
В работающей системе выключаются интегральная и дифференциальная составляющие регулятора (Tи = ∞, Tд = 0), т.е. система переводится в П-закон регулирования. Путем последовательного увеличения Kp с одновременной подачей небольшого скачкообразного сигнала задания добиваются возникновения в системе незатухающих колебаний с периодом Kkp. Это соответствует выведению системы на границу колебательной устойчивости.
При возникновении данного режима работы фиксируются значения критического коэффициента усиления регулятора Kkp и периода критических колебаний в системе Tkp. При появлении критических колебаний ни одна переменная системы не должна выходить на уровень ограничения. По значениям Kkp и Tkp рассчитываются параметры настройки регулятора:
Расчет настроек регулятора можно производить по критической частоте собственно объекта управления ωkp. Учитывая, что собственная частота ωkp объекта управления совпадает с критической частотой колебаний замкнутой системы с П-регулятором, величины Kkp и Tkp могут быть определены по амплитуде и периоду критических колебаний собственно объекта управления.
При выведении замкнутой системы на границу колебательной устойчивости амплитуда колебаний может превысить допустимое значение, что в свою очередь приведет к возникновению аварийной ситуации на объекте или к выпуску бракованной продукции. Поэтому не все системы управления промышленными объектами могут выводиться на критический режим работы.
Метод затухающих колебаний
Применение этого метода позволяет настраивать регуляторы без выведения системы на критические режимы работы. Так же, как и в предыдущем методе, для замкнутой системы с П-регулятором, путем последовательного увеличения Kp добиваются переходного процесса отработки прямоугольного импульса по сигналу задания или возмущения с декрементом затухания D = 1/4.
Далее определяется период этих колебаний Tк и значения постоянных интегрирования и дифференцирования регуляторов Tи и Tд
После установки вычисленных значений Tи и Tд на регуляторе необходимо экспериментально уточнить величину Kp для получения декремента затухания D = 1/4. С этой целью производится дополнительная подстройка Kp для выбранного закона регулирования, что обычно приводит к уменьшению Kp на 20 ÷ 30%. Аналогичный метод настройки используется в адаптивных регуляторах американской фирмы "Фоксборо".
Большинство промышленных систем регулирования считаются качественно настроенными, если их декремент затухания D равен 1/4 или 1/5.
В настоящее время разработан новый метод настройки замкнутых систем управления, основанный на подаче пробных синусоидальных колебаний на вход регулятора. По амплитуде и фазе колебаний выходного сигнала объекта управления осуществляется расчет настроек ПИ-регулятора, исходя из условия обеспечения заданного показателя колебательности M и максимума отношения Kp / Tи.





14. Настройка регуляторов опытным путем.
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: При сдаче лабораторной работы, студент делает вид, что все знает; преподаватель делает вид, что верит ему. 9406 —  | 7313 —
| 7313 —  или читать все.
или читать все.
91.146.8.87 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
Для определения оптимальных параметров настройки регуляторов (параметрической оптимизации) АСР необходимо иметь сведения о статических и динамических характеристиках объекта регулирования и действующих возмущений. Наиболее достоверными являются экспериментально определенные статические характеристики.
Оптимальная настройка ПИД-регулятора позволяет максимально быстро и почти без перерегулирования вывести объект на уставку. Признак правильной настройки – плавный, без рывков, рост регулируемого параметра и наличие тормозящих импульсов при подходе к уставке как снизу, так и сверху (рис. 14.39).
Если объект выходит на уставку с небольшим перерегулированием и быстрозатухающими колебаниями, можно немного уменьшить коэффициент усиления, оставив все остальные параметры без изменения.
Величина максимума амплитудно-частотной характеристики замкнутой системы регулирования, а также ее резонансная частота могут быть определены из временной характеристики системы относительно управляющего воздействия по условной величине ее степени затухания  и частоте
и частоте (рис. 14.40).
(рис. 14.40).
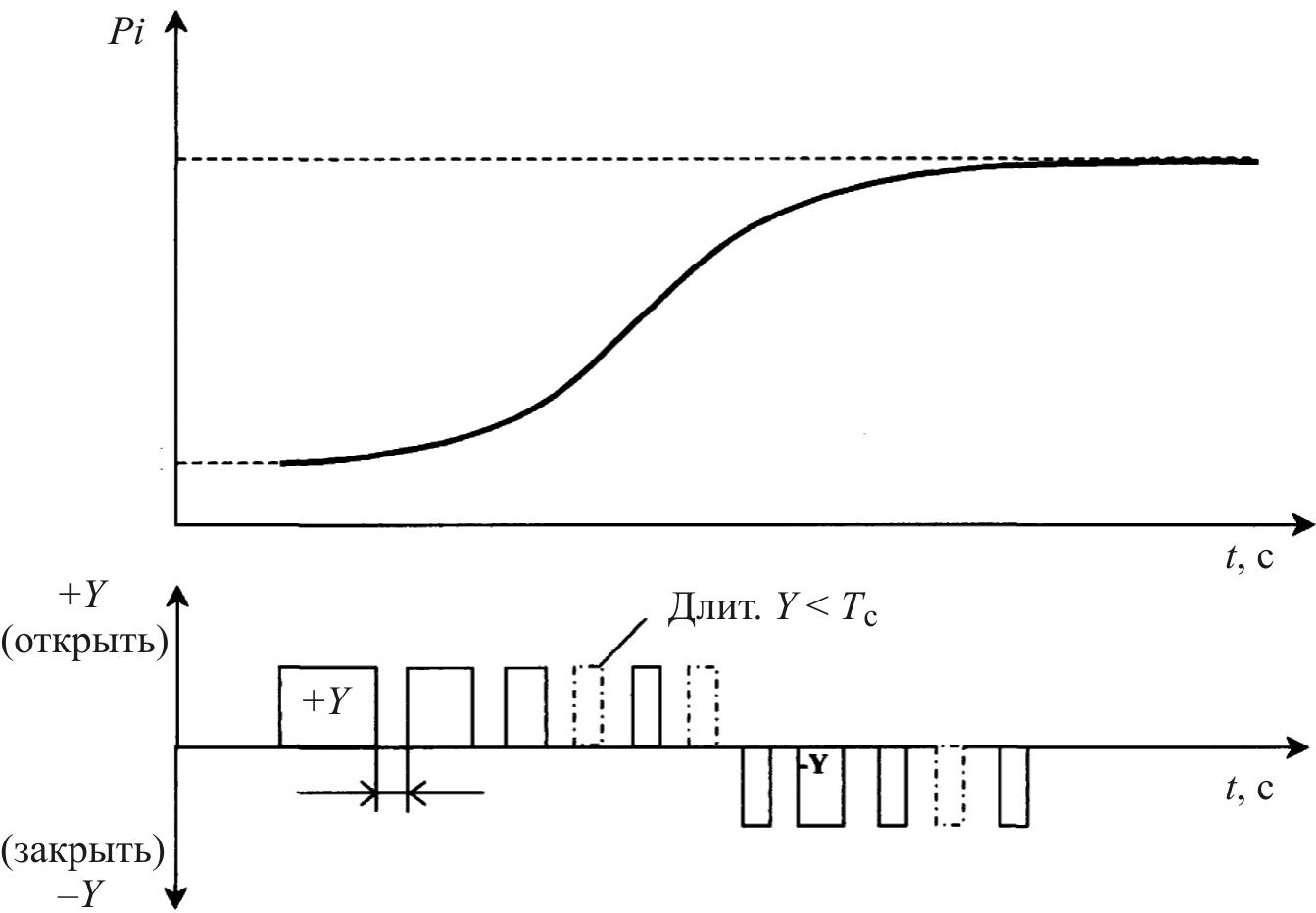
Рис. 14.39. Оптимальная работа ПИД-регулятора
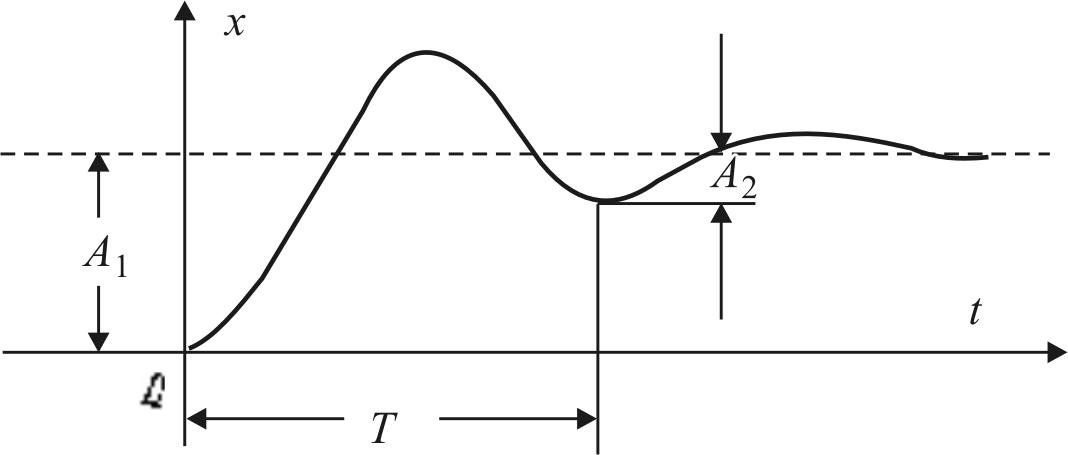
Рис. 14.40. Переходная характеристика замкнутой системы регулирования
Указанное обстоятельство позволяет приближенно определить параметры регулируемого объекта  и
и по полученной экспериментально кривой переходного процесса при ступенчатом воздействии со стороны задатчика регулятора. Действительно, если известны степень затухания переходного процесса и его частота, а также числовые значения параметров настройки регулятора, при которых регистрировался этот процесс, то принципиально не представляет труда определить, каковы должны быть числовые значения параметров объекта
по полученной экспериментально кривой переходного процесса при ступенчатом воздействии со стороны задатчика регулятора. Действительно, если известны степень затухания переходного процесса и его частота, а также числовые значения параметров настройки регулятора, при которых регистрировался этот процесс, то принципиально не представляет труда определить, каковы должны быть числовые значения параметров объекта и
и для того, чтобы амплитудно-фазовая характеристика разомкнутой системы с известными параметрами настройки регулятора касалась окружности с индексом, соответствующим этой степени затухания при частоте, соответствующей частоте переходного процесса.
для того, чтобы амплитудно-фазовая характеристика разомкнутой системы с известными параметрами настройки регулятора касалась окружности с индексом, соответствующим этой степени затухания при частоте, соответствующей частоте переходного процесса.
Порядок определения оптимальной настройки ПИ-регулятора по графику временной характеристики замкнутой системы регулирования с помощью графиков заключается в следующем:
1. Система регулирования при произвольной настройке регулятора включается в работу. Убедившись, что она работает устойчиво, быстро изменяют задание регулятору на некоторую достаточно большую, но допустимую по условиям эксплуатации величину и регистрируют процесс изменения регулируемой величины во времени.
2. Из полученного графика изменения регулируемой величины, типовой вид которого приведен на рис. 14.40, определяются степень затухания  и период колебаний переходного процессаТ.
и период колебаний переходного процессаТ.
3. Вычислив величину отношения периода колебаний переходного процесса к установленному в регуляторе во время проведения эксперимента значению времени изодрома, находят величины поправочных множителей на величину коэффициента передачи регулятора и на величину его времени изодрома, т.е. определяют, во сколько раз следует изменить числовые значения параметров настройки регулятора, чтобы настройка оказалась близкой к оптимальной.
4. Установив найденные параметры настройки в регуляторе, опыт повторяют и производят повторный расчет, аналогичный изложенному выше. Если окажется, что числовые значения поправочных коэффициентов близки к единице (находятся в пределах 0,95–1,05), можно считать, что настройка окончена. В противном случае необходимо произвести повторную перенастройку.
В практике наладочных работ используют приближенные формулы для определения оптимальных параметров настройки регуляторов для объектов, описываемых нижеприведенными выражениями при различных критериях оптимальности.
1. Всесоюзным теплотехническим институтом имени Ф.Э. Дзержинского (ВТИ) рекомендуются для степени затухания за период = 0,75 и интегральной квадратичной оценки, близкой к минимуму, следующие формулы расчета для параметров ПИ-регулятора с передаточной функцией:
Самая простая настройка, когда в замкнутой АСР с ПИ-регулятором (при ПИ-регуляторе Тизустанавливают очень большим) увеличиваютKpдо границы устойчивости, определяютKp.кри Тпер.кр–период установившихся колебаний. Затем выставляют параметры:
6. Лучшие результаты дает пошаговая оптимизацияс оценкой переходной характеристики на каждом шаге.
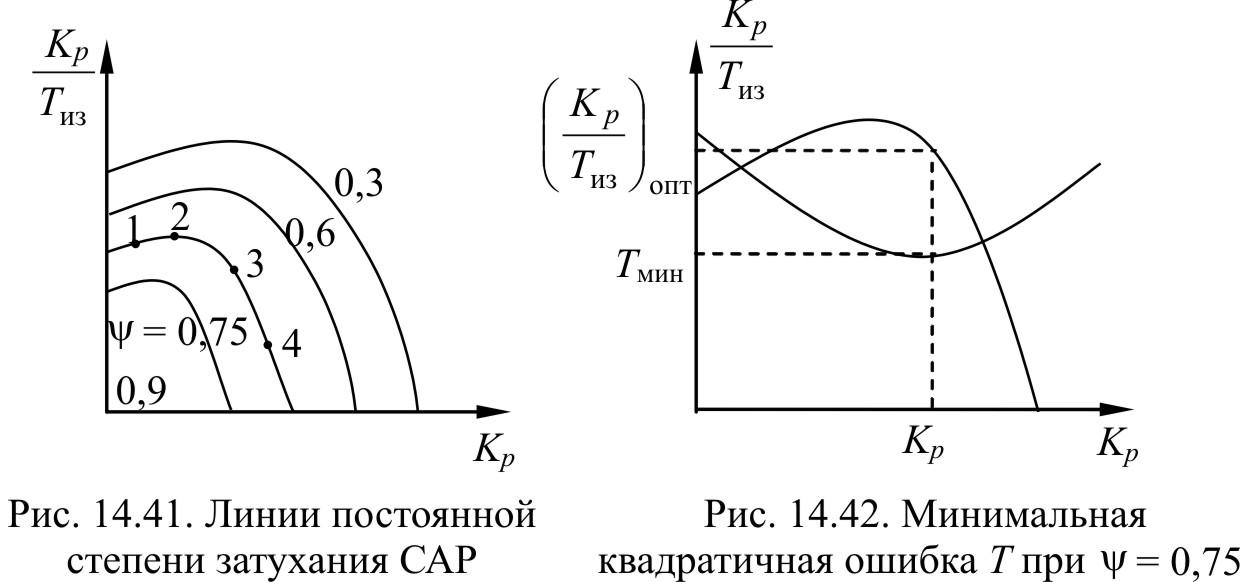
В плоскости параметров настройки ПИ-регулятора существуют линии одинаковой степени затухания (рис. 14.41).
Одно и то же затухание (пусть ψ= 0,75) можно получить при различных параметрах регулятора. Нужно обеспечить при этом минимальную квадратичную ошибку, которая изменяется в плоскости как показано на рис. 14.42. Таким образом, надо искать оптимальную точку настройки.
Из кривых (рис. 14.43) для различных настроек можно видеть, что в точках 1 и 2 переходные процессы затянуты, в точке 4 имеется апериодическая составляющая, затягивающая процесс. Поиск оптимальной настройки состоит из следующих этапов (рис. 14.44, 14.45):
2. Увеличивают Kр, чтобы при колебательном процессе ψ = 0,8–0,9 (точка 2).

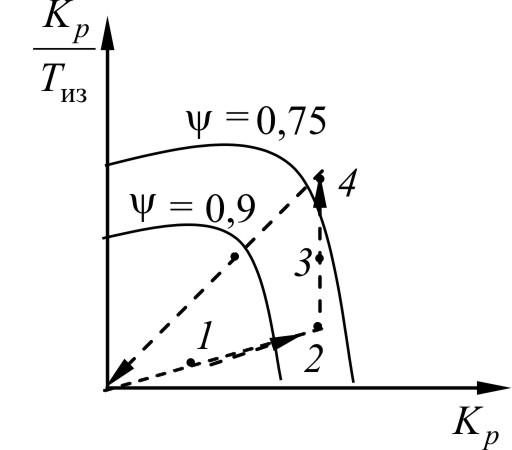
Рис. 14.44. Этапы практической настройки параметров ПИ-регулятора
3. УменьшаютТиз, чтобы избавиться от апериодической составляющей (точки3,4).
4. УменьшаютKр, чтобы приψ= 0,95…1 и при различных вариациях динамических свойств объекта регулирования переходные процессы были слабоколебательными (точка5).
Данный метод оптимизации не требует точного определения параметров объекта и параметров регулятора, так как варьирование параметров настройки производят относительно исходных значений, поэтому он широко применяется.
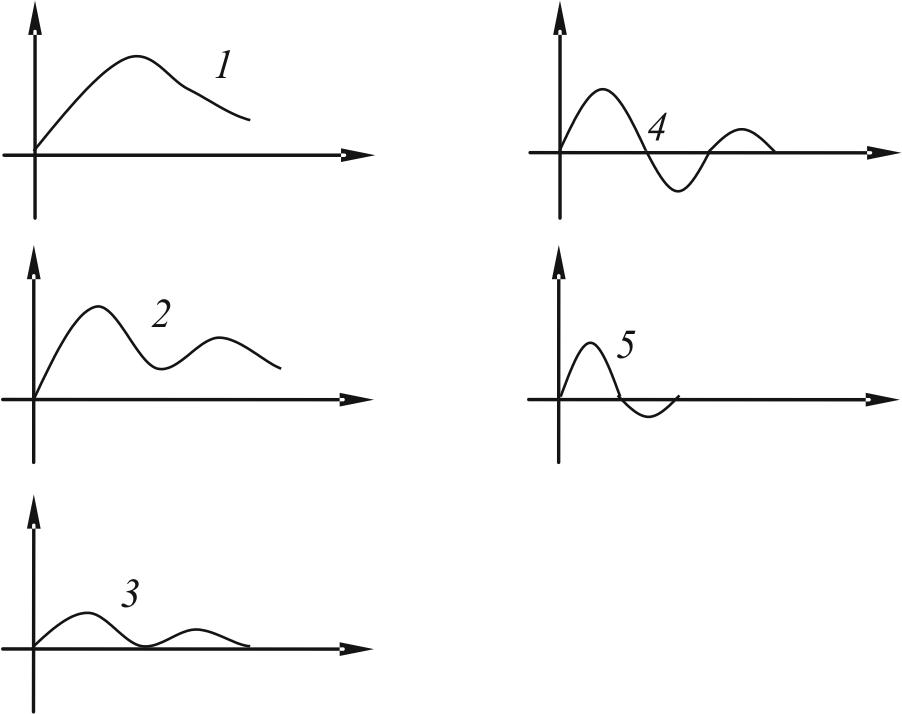
Рис. 14.45. Характер переходных процессов при различных настройках параметроврегуляторов
К примеру, в инструкции для наладчика САР с цифровым ПИ-регулятором даны следующие рекомендации.
регулятор настроен на ПИ-регулирование;
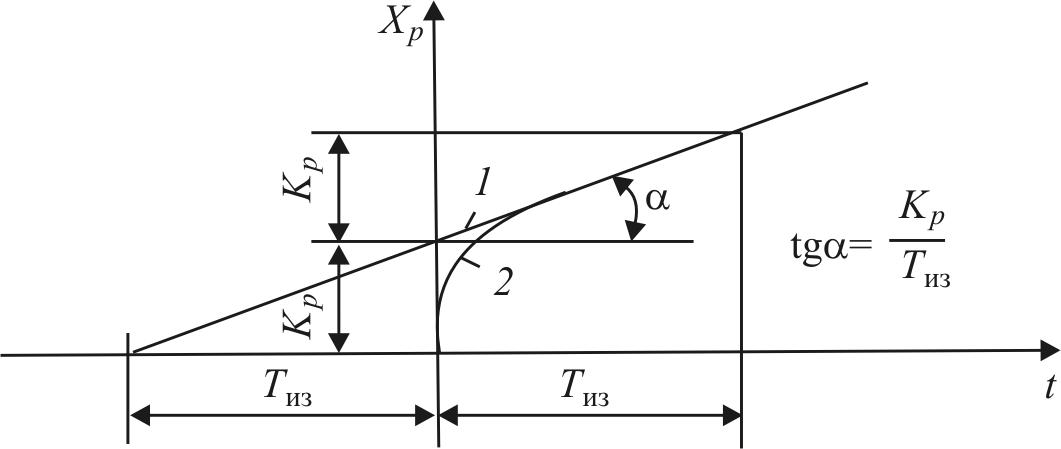
Рис. 14.46. Переходный процесс выходного сигнала ПИ-регулятора
структурная схема управления приведена на рис. 14.47;

Рис. 14.47. Структурная схема управления объектом с пневматическим исполнительным механизмом:w– задающее воздействие;x– регулируемая величина;xd– отклонение регулируемой величины;y– управляющее воздействие;1 – измерительный преобразователь; 2 – задатчик величины; 3 – регулировочный усилитель; 4 – электропневматический преобразователь сигнала; 5 – датчик; 6 – пневматический исполнительный блок

ручная установка параметров регуляторов без знания характеристики объекта. Параметры регуляторов для оптимальной регулировки оборудования в этом случае еще не известны. Для удержания регулирующего контура в стабильном состоянии имеются следующие заводские установки ПИ-регулятора:
– пропорциональный коэффициент Kр= 0,1;
– настройка параметров ПИ-регулятора:
установить желаемую заданную величину и в ручном режиме установить рассогласование регулирования на ноль;
переключиться на автоматический режим;
медленно увеличивать Kр, пока регулирующий контур через малые изменения заданной величины не начнет клониться к колебаниям;
незначительно уменьшать Kр, пока колебания не будут устранены;
уменьшать Tnдо тех пор, пока регулирующий контур снова не начнет клониться к колебаниям;
медленно увеличивать Tn до тех пор, пока уклон к колебаниям не будет устранен.
Автоматизация турбо механизмов
— Измерение расхода и давление жидкости и газа.
— Измерение расхода и давление жидкости и газа.
— Q-H — характеристики турбо механизмов при различных способах регулирования производительности.
— Структурная схема регулирования давления в магистрали в зависимости от расхода.
— Экономический эффект от применения частотно-регулируемых электроприводов.
насосы — машины, подающие жидкости;
вентиляторы и компрессоры — машины, подающие воздух и технические газы.
Вентилятор— машина, перемещающая газовую среду при степени повышения давления Ер 1,15 и имеющая искусственное (обычно водяное) охлаждение полостей, в которых происходит сжатие газов.
Согласно ГОСТ 17398—72 нагнетатели (насосы) подразделяются на две основные группы: насосы динамические и объемные.
В динамических нагнетателях передача энергии жидкости или газу происходит путем работы массовых сил потока в полости, постоянно соединенной с входом и выходом нагнетателя.
В объемных нагнетателях повышение энергии рабочего тела (жидкости или газа) достигается силовым воздействием твердых тел, например поршней в поршневых машинах в рабочем пространстве цилиндра, периодически соединяемым при помощи клапанов с входом и выходом нагнетателя.






