 При проектировании электропривода электродвигатель должен выбираться так, чтобы его механические характеристики соответствовали механическим характеристикам производственного механизма. Механические характеристики дают взаимосвязь переменных в установившихся режимах.
При проектировании электропривода электродвигатель должен выбираться так, чтобы его механические характеристики соответствовали механическим характеристикам производственного механизма. Механические характеристики дают взаимосвязь переменных в установившихся режимах.
Механической характеристикой механизма называют зависимость между угловой скоростью и моментом сопротивления механизма, приведенными к валу двигателя) ω = f(Mс).
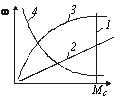
Рис. 1. Механические характеристики механизмов
Среди всего многообразия выделяют несколько характерных типов механических характеристик механизмов:
1. Характеристика с моментом сопротивления, не зависящим от скорости (прямая 1 на рис. 1). Независимая от скорости механическая характеристика графически изображается прямой, параллельной оси вращения, в данном случае вертикалью. Такой характеристикой обладают, например, подъемные краны, лебедки, поршневые насосы при неизменной высоте подачи и др.
2. Характеристика с моментом сопротивления линейно зависящим от скорости (прямая 2 на рис. 1). Такая зависимость присуща, например, приводу генератора постоянного тока с независимым возбуждением, работающему на постоянную нагрузку.
3. Характеристика с нелинейным возрастанием момента (кривая 3 на рис. 1). Типичными примерами емогут служить характеристики вентиляторов, центробежных насосов, гребных винтов. Для этих механизмов момент Мс зависит от квадрата угловой скорости ω . Это т.н. параболичская (вентиляторная) механическая характеристика.
4. Характеристика с нелинейно спадающим моментом сопротивления (кривая 4 на рис. 1). Здесь момент сопротивления обратно пропорционален скорости вращения. Мощность в этом случае остается постоянной на всем диапазоне рабочей скорости механизма. Например, у механизмов главного движения некоторых металлорежущих станков (токарных, фрезерных, расточных) момент Мс изменяется обратно пропорционально ω , а мощность потребляемая механизмом, остается постоянной.
Механической характеристикой электродвигателя называется зависимость его угловой скорости от вращающего момента ω д = f(M).Здесь следует иметь ввиду, что момент М на валу двигателя независимо от направления вращения имеет положительный знак — момент движущий. Вместе с тем момент сопротивления Мс имеет знак отрицательный.
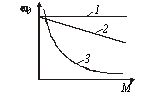
В качестве примеров на рис. 2 приведены механические характеристики: 1 — синхронного двигателя; 2 – двигателя постоянного тока независимого возбуждения; 3 – двигателя постоянного тока последовательного возбуждения.
Для оценки свойств механических характеристик электропривода используют понятие жесткости характеристики. Жесткость механической характеристики определяется по выражению
где d М – изменение момента двигателя; d ω д – соответствующее изменение угловой скорости.
Для линейных характеристик значение β остается постоянным, для нелинейных – зависит от рабочей точки.
Используя это понятие, характеристики, приведенные на рис. 2, можно качественно оценить так: 1 – абсолютно жесткая ( β = ∞ ); 2 – жесткая; 3 – мягкая.
Абсолютно жесткая характеристика — скорость вращения двигателя остается неизменной при изменении нагрузки двигателя в пределах от нуля для номинальной. Такой характеристикой обладают синхронные двигатели.
Жесткая характеристика — скорость вращения меняется незначительно при изменении нагрузки от нуля до номинальной. Такой характеристикой обладает двигатель постоянного тока с параллельным возбуждением, а также асинхронный двигатель в области линейной части характеристики.
Жесткой характеристикой принято считать такую, у которой изменение скорости не превышает приблизительно 10% номинальной скорости при изменении нагрузки от нуля до номинальной.
Мягкая характеристика — скорость вращения двигателя меняется значительно при сравнительно небольших изменениях нагрузки. Такой характеристикой обладает двигатель постоянного тока с последовательным, смешанным или с параллельным возбуждением, но с добавочным сопротивлением в цепи якоря, а также асинхронный с сопротивлением в цепи ротора.
Для большинства производственных механизмов используют асинхронные двигатели с короткозамкнутым ротором, имеющие жесткую механическую характеристику.
Все механические характеристики электродвигателей делятся на естественные и искусственные.
Естественная механическая характеристика относится к условиям работы двигателя с номинальными значениями параметров.
Например, для двигателя с параллельным возбуждением естественная характеристика может быть построена для случая, когда напряжение на якоре и ток возбуждения имеют номинальные значения, а в цепи якоря отсутствует добавочное сопротивление.
Естественная характеристика асинхронного двигателя соответствует номинальному напряжению и номинальной частоте переменного тока, подводимого к статору двигателя при условия отсутствия добавочного сопротивления в цепи ротора.
Таким образом, для каждого двигателя естественная характеристика может быть построена только одна, а искусственных — неограниченное количество. Например, каждому новому значению сопротивления якоря двигателя постоянного тока или в цепи ротора асинхронного двигателя отвечает своя механическая характеристика.
Механической характеристикой рабочей машины называется зависимость: М = f (ω),
где М — момент сопротивления рабочей машины, Н•м; ω — угловая скорость, рад/с; ω=πn/30; π — частота вращения, об/мин.
Большинство механических характеристик машин позволяет описать следующая эмпирическая формула:
где М0 — начальный момент сопротивления при ω = 0; ω — текущее значение угловой скорости, соответствующее текущему значению момента М; Мс.ном — статический момент сопротивления при ωном.
При х = 0 получается не зависящая от скорости механическая характеристика, для которой М = Мс.ном (прямая 1 на рис. 1). Такая характеристика у подъемных кранов, лебедок. К этой группе могут быть отнесены механизмы, у которых основное сопротивление создают силы трения (навозоуборочные транспортеры, кормораздатчики, шнеки, конвейеры, барабаны сушилок, триеры).
При х=1 получается линейно возрастающая характеристика (линия 2 на рис.1). Ею обладают многие машины, у которых основные сопротивления создаются силами трения совместно с аэродинамическими (молотилки, дробилки кормов, лесопильные рамы, зерноочистительные машины). Иногда такая характеристика называется генераторной, так как она присуща генераторам постоянного тока независимого возбуждения при постоянной нагрузке.

Если х=2, то момент сопротивления пропорционален квадрату угловой скорости (кривая 3 на рис.1). Такая характеристика называется вентиляторной. Так изменяется момент сопротивления вентиляторов, компрессоров, центробежных насосов, сепараторов, пневматических транспортеров и других механизмов, принцип работы которых основан на законах аэро- и гидродинамики.
Если х=-1, то получается нелинейно спадающая характеристика (кривая 4 на рис.1), для которой момент сопротивления изменяется обратно пропорционально скорости, а мощность остается постоянной (такой характеристикой обладают металлорежущие станки, у которых с увеличением подачи скорость вращения деталей уменьшается).
45)
Назначение и классификация ВОМ. Расположение ВОМ по отношению к трактору.
Вал отбора мощности (ВОМ) служит для приведения в действие рабочих органов, присоединяемых к трактору машин. Вал отбора мощности может устанавливаться сзади, сбоку и спереди трактора. В зависимости от привода применяются валы отбора мощности зависимые, полунезависимые, синхронные и комбинированные. Вал с зависимым приводом прекращает вращение при выключении главной муфты сцепления.Вал, который можно включить или выключить независимо от главной муфты сцепления, называют валом отбора мощности с независимым приводом. Муфту сцепления ВОМ располагают либо совместно с главной муфтой сцепления на маховике двигателя, либо непосредственно у хвостика вала.Вал отбора мощности, привод которого осуществляется обычно через муфту сцепления, смонтированную вместе с главной муфтой и управляемую общей педалью, называется полунезависимым. Чтобы выключить полунезависимый привод ВОМ, необходимо предварительно выключить главную муфту сцепления.Вал, который изменяет число оборотов при переключении передач, называют валом отбора мощности с синхронным приводом
Что понимают под термином «относительная величина» в теории электропривода?
Относительная величина в статистике – это обобщающий показатель, который дает числовую меру соотношения двух сопоставляемых абсолютных величин. Так как многие абсолютные величины взаимосвязаны, то и относительные величины одного типа в ряде случаев могут определяться через относительные величины другого типа.
Основное условие правильного расчета относительной величины – сопоставимость сравниваемых показателей и наличие реальных связей между изучаемыми явлениями. Таким образом, по способу получения относительные показатели – всегда величины производные, определяемые в форме коэффициентов, процентов, промилле, продецимилле и т.п. Однако нужно помнить, что этим безразмерным по форме показателям может быть, в сущности, приписана конкретная, и иногда довольно сложная, единица измерения. Так, например, относительные показатели естественного движения населения, такие как коэффициенты рождаемости или смертности, исчисляемые в промилле (‰), показывают число родившихся или умерших за год в расчете на 1 000 человек среднегодовой численности; относительная величина эффективности использования рабочего времени – это количество продукции в расчете на один отработанный человеко-час и т.д.
46)
1. Устройство и принцип работы планетарного механизма поворота.
Планетарный механизм поворота состоит из двух симметрично расположенных одинаковых планетарных механизмов управления правой и левой гусеницами. Механизм собран в цилиндрическом корпусе 5, установленном на подшипниках в корпусе заднего моста.Рисунок. Схема планетарного механизма поворота: 1 — тормозной шкив полуоси (водила); 2 — полуось; 3 — тормозной шкив солнечной шестерни; 4 — ведомая шестерня главной передачи; 5 — корпус планетарного механизма; 6 — зубчатый венец (корона); 7 — водило; 8 — ось сателлита; 9 — сателлит; 10 — солнечная шестерня; 11 — тормозная лента тормоза солнечной шестерни; 12 — тормозная лента тормоза полуоси (водила); 13 — рычаг; 14 — тяга; 15 — пружина тормозной ленты; 16 — рычаг тормоза солнечной шестерни; 17 — педаль тормоза полуоси.
Работой планетарного механизма управляют тормоза, помещенные в боковых отделениях корпуса заднего моста, привод которых осуществляется с помощью рычага 16 и педали 17.При прямолинейном движении трактора педаль 17 и рычаг 16 отпущены. В этом случае тормозные шкивы 1 полуосей 2 свободны, а шкивы 3, затянутые тормозными лентами 11 посредством пружины 15, вместе с солнечными шестернями 10 находятся в неподвижном состоянии. Шестерни главной передачи вращают корпус 5, а он своими коронами 6 приводит во вращение сателлиты 9, заставляя их обкатываться по неподвижным шестерням 10. Увлекаемые осями 8 сателлитов водила 7 передают вращение полуосям 2 и от них через конечные передачи ведущим звездочкам гусениц.Для поворота трактора перемещают соответствующий рычаг 16 на себя, лента 11 отпускает тормозной шкив 5, и солнечная шестерня 10 освобождается. При этом сателлиты начинают вращать шестерню 10 и сторону, противоположную направлению вращения водила 7, усилие на водило не передается, и оно вместе со своей полуосью останавливается, гусеница отключается от трансмиссии, в то время как вторая гусеница продолжает движение и поворачивает трактор. Для более крутого поворота после перемещения рычага 16 нажимают педаль 17. При этом тяга 14, поворачивая рычаг 13, затягивает тормозную ленту 12 на тормозном шкиве 1, и полуось 2 затормаживается.
Затраты мощности, необходимые для поворота, в механизмах управления с фрикционными муфтами и планетарными механизмами равноценны. Они в одинаковой степени обеспечивают прямолинейность движения. В современных конструкциях тракторов широко применяют планетарные механизмы. Они надежнее и требуют меньших усилий на рычагах управления

Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
1. Механические характеристики рабочих машин (зависимость угловой скорости механизма от момента сопротивления на его валу)  :
:
1 – не зависящая от скорости;
2 – линейно зависящая;
3 – нелинейно зависящая (вентиляторная);

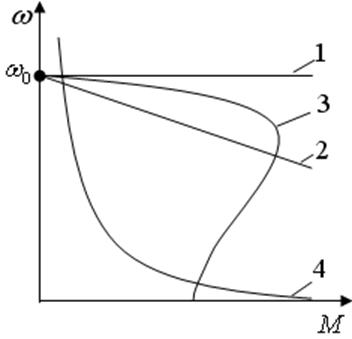
2. Механические характеристики ЭД (зависимость угловой скорости двигателя от момента сопротивления на его валу)  :
:
1 – синхронный двигатель (СД);
2 – двигатель постоянного тока с независимым возбуждением (ДПТ с НВ) и вентильный двигатель (ВД);
3 – трехфазный асинхронный двигатель (АД);
4 – двигатель постоянного тока с последовательным возбуждением (ДПТ с ПВ);
При выборе привода согласование механических характеристик двигателя и рабочей машины происходит по следующим параметрам:
а) по диапазону регулирования скорости  ;
;
б) по нагрузке (  ,
,  );
);
в) по энергетическим показателям (  ).
).
Механические характеристики ДПТ
1) Механические характеристики ДПТ с независимым возбуждением
Уравнение механической характеристики  ;
;
где  — конструктивная постоянная двигателя,
— конструктивная постоянная двигателя,  — число пар полюсов;
— число пар полюсов;  — число активных стержней;
— число активных стержней;  — число пар параллельных ветвей (количество обмоток в секции);
— число пар параллельных ветвей (количество обмоток в секции);  — сопротивление якорной цепи.
— сопротивление якорной цепи.
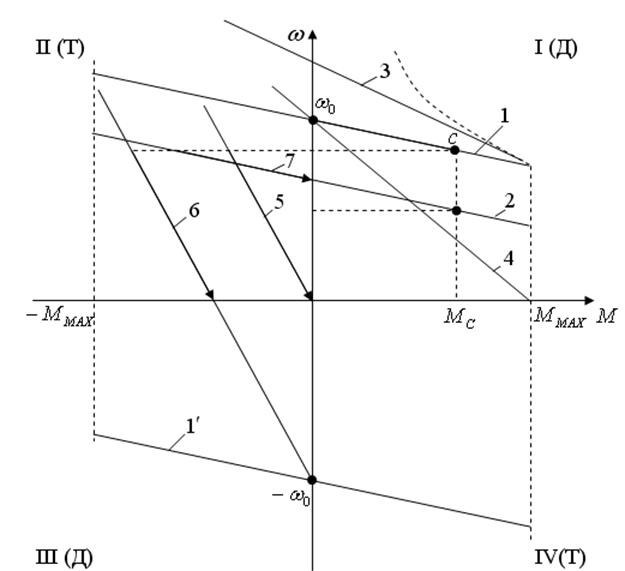
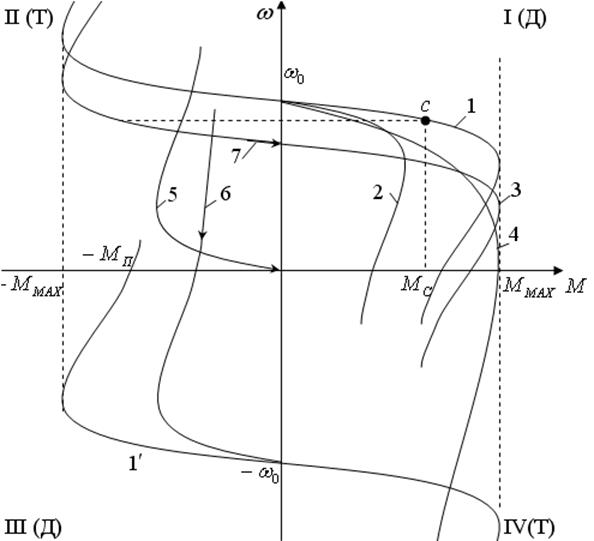
1 – Естественная характеристика при всех номинальных параметрах (  )
)
1′ – Инверсная (реверсная) характеристика. Для реверса ДПТ с НВ
2 – Управление напряжением якоря  (1-я зона управления)
(1-я зона управления)
3 – Управление магнитным потоком  (2-я зона управления)
(2-я зона управления)
4 – Управление сопротивлением 
Наиболее экономичный способ регулирования скорости ДПТ связан с изменением напряжения, подводимого к якорю, а не сопротивлений цепи якоря или обмотки возбуждения. Для регулирования напряжения необходимы специальные силовые преобразователи (управляемые выпрямители).
5 – Динамическое торможение: двигатель отключается от сети, якорь закорачивается на сопротивление, ;
6 – Торможение противотоком;
7 – Рекуперация (отдача энергии двигателем обратно в сеть). Условия рекуперации:  , реверс момента. Реализуется с помощью управляемого преобразователя, включенного в цепь якоря двигателя.
, реверс момента. Реализуется с помощью управляемого преобразователя, включенного в цепь якоря двигателя.
2) Механические характеристики ДПТ с последовательным возбуждением
 ;
;  ;
;  ;
;
 т.е. механическая характеристика нелинейная.
т.е. механическая характеристика нелинейная.

1 – естественная характеристика;
2 —  — ввод добавочного сопротивления;
— ввод добавочного сопротивления;
3 – динамическое торможение;
4 – режим противотока.
У данных ДПТ  , т.е. двигатель нельзя включать без нагрузки и применять ременные передачи. По этой же причине рекуперация невозможна. Применяется в подъемных и транспортных машинах.
, т.е. двигатель нельзя включать без нагрузки и применять ременные передачи. По этой же причине рекуперация невозможна. Применяется в подъемных и транспортных машинах.
Механические характеристики асинхронных двигателей (АД)
1) Механические характеристики 3-фазных АД
Асинхронный электродвигатель имеет трехфазную обмотку статора. При подаче на неё трехфазного напряжения частотой  , образуется магнитное поле, вращающееся с угловой скоростью
, образуется магнитное поле, вращающееся с угловой скоростью  , где
, где  — число10
— число10
пар полюсов статора (определяется укладкой обмотки).
Ротор АД чаще всего выполняется короткозамкнутым ("беличья клетка"). В подъёмных и транспортных машинах применяют фазный ротор, где обмотка ротора через контакные кольца выводится на неподвижное основание и соединяется с добавочными сопротивлениями.
В настоящее время АД по умолчанию применяют для привода большинства объектов.
При описании АД электрические параметры двигателя имеют индексы: 1 – статор; 2 – ротор.
При R1=0 механическая характеристика описывается формулой
 , где
, где  — критический момент;
— критический момент;  — скольжение.
— скольжение.
1 – естественная (  );
);
1′ – реверс (меняются местами две из трех фаз);
2 —  ,
,  ;
;
3 —  или
или  ;
;
4 – АД с фазным ротором  ,
,  .
.
5 – динамическое торможение: на обмотку статора подается постоянный ток, тогда раскручиваемый ротор будет тормозиться;
6 – противоток (реверс): (меняются местами две фазы);
7 – рекуперация  , реверс момента. Для торможения до нуля требуется ПЧ, который непрерывно снижает .
, реверс момента. Для торможения до нуля требуется ПЧ, который непрерывно снижает .
Пуск АД: Для ограничения пусковых токов АД большой мощности или получения плавного пуска асинхронного привода применяют:
1) включение активных или индуктивных сопротивлений в цепи статора, которые выводятся в конце пуска;
2) "частотный" пуск через преобразователь, плавно изменяющий частоту питания двигателя  ;
;
3) пуск с фазным ротором;
4) реакторный пуск – включение индуктивных сопротивлений в цепь ротора. Вначале пуска частота тока в роторе близка к частоте сети, индуктивное сопротивление  велико и ограничивает пусковой ток.
велико и ограничивает пусковой ток.
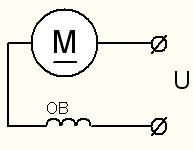
2) Механические характеристики двухфазных АД
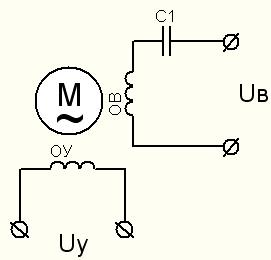
Выпускаются на мощность до 1 кВт. Могут выполняться со сплошным или полым ротором. ОВ, ОУ – соответственно обмотки возбуждения и управления; Для сдвига фаз в цепь ОВ последовательно включают конденсатор емкостью 1-2 мкФ на каждые 100 Вт.
 , при однофазном включении
, при однофазном включении  .
.
Примечание: при частотном управлении характеристики станут линейными и параллельными друг другу, при фазовом – только линейными.
Последнее изменение этой страницы: 2016-12-30; Нарушение авторского права страницы






