Содержание
Знакомство с такой серьезной и загадочной отраслью науки, как робототехника всегда производит на детей сильное впечатление, вызывает у них интерес к науке и жажду своих собственных исследований. Кроме того, у этой игрушки прикладное назначение – знакомство ребенка с законами механики и их применение в реальной жизни. Получается, что это вовсе и не игрушка, а замечательный помощник в учебе!
С удовольствием представляю Вам мастер класс по изготовлению механической руки. По внешнему виду она напоминает экзоскелет, повторяющий естественные движения человеческой руки. Чтобы управлять этим удивительным устройством юному инженеру понадобится изучить строение человеческой руки и перенести его на картонный прототип, а затем "научить" руку двигаться.
Для работы понадобятся следующие материалы и инструменты:
картон; простой карандаш и маркер;ножницы;канцелярский нож;5 пластиковых трубочек; аптечные резинки; нитки средней толщины, иголка; клеящий пистолет.

Ход работы.
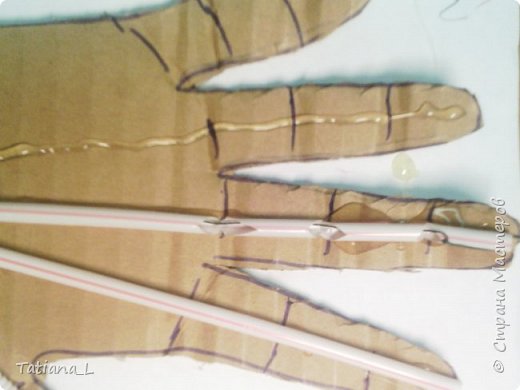
Шаг первый. Положите руку на картон, обведите и вырежьте.

Обратите внимание на направление волокон многослойного картона.

Шаг второй. Промаркируйте линии сгибов фаланг на картоне, ориентируясь по своей руке.

Шаг третий. В местах сгибов фаланг пальцев сделайте небольшие надрезы канцелярским ножом на внешней стороне руки. Зафиксируйте сгибы на каждой фаланге.

Пальцы картонной руки должны свободно сгибаться в местах надрезов.

Шаг четвертый. Прикрепите пластиковые трубочки с помощью скотча к "руке" как показано на рисунке.

Шаг пятый. Теперь на местах сгиба фаланг пальцев сделайте надрез на пластиковых трубочках на внутренней стороне. Надрезы должны иметь угол примерно 45 градусов, чтобы «пальцы» могли сгибаться.

Шаг шестой. Удалите скотч и приклейте пластиковые трубочки к картону с помощью клеевого пистолета как показано на рисунке.
Шаг седьмой. Проденьте в трубочки нитки и закрепите их на концах "пальцев". Здесь же прикрепите аптечные резинки.
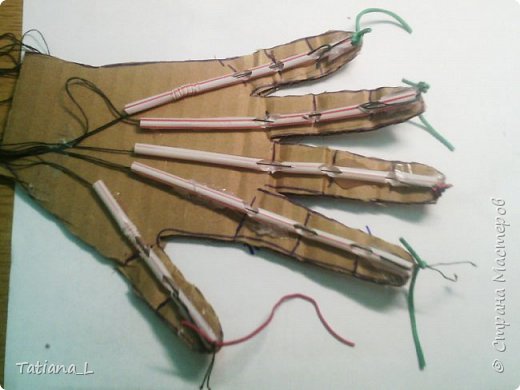
Шаг восьмой. С помощью клеевого пистолета закрепите резинки на тыльной стороне "руки".

Механическая рука готова! Удерживая нити в руке и потягивая их на себя можно выполнять различные движения рукой: сгибать пальцы, брать легкие предметы и т.п.

Поняв принцип работы механической руки, можно предложить детям сделать собственные проекты по изготовлению собственных вариантов экзоскелетных рук. На детей производит особое впечатление, когда на такую "руку" надета перчатка.

Для более наглядного изучения строения человеческой руки можно с тыльной стороны можно нарисовать скелет реальных костей руки.

Желаю всем приятно и с пользой провести время с детьми!
Всем привет. Костюмы на Хэллоуин могут быть разных форм и размеров. Например, костюм железного человека или бэтмена носят простые парни, которые ходят с нами по одной улице 🙂 Сложнее обстоят дела с костюмами монстров, размеры которых значительно больше роста среднестатистического человека (не всем повезло уродится богатырями). Городить огромную неподвижную фигуру было бы просто глупо. Она должна двигаться и уметь хватать за шиворот зазевавшихся прохожих.

Эта статья, как раз и посвящена тому, как можно сделать такие большие подвижные механические руки своими руками. Мне не хотелось изобретать велосипед, поэтому я рыскал по просторам интернета в поисках идей. Найдя несколько неплохих вариантов, собрал их воедино, внеся свои дополнительные корректировки.

Я попытался сделать этот проект максимально простым, используя материалы, которые можно найти в ближайшем стоймаге.
Материалы:
- Доска толщиной 5 см и шириной 10 см (для предплечья). Из неё же вырезались пальцы-фаланги 3,8*3,8 см;
- Доска толщиной 5 см и шириной 15 см (для ладоней);
- 60 х Саморезы с кольцами (лучше брать из нержавейки, чем оцинкованые);
- Стальной трос длиной около 3 м;
- 16 х Гвозди без шляпок длиной 10 см;
- Эластичный шнур длиной 3,6 м;
- 6 х Кольцо для брелка диаметром 2,5 см.
Инструменты:
- настольная циркулярка;
- ленточная пила;
- сверлильный станок;
- дрель/шуруповёрт;
- гравер;
- молоток;
- узкие плоскогубцы;
- болгарка;


Мне хотелось, чтобы руки имели по 3 пальца. Набросаем эскиз и рассчитаем длину каждой фаланги. Мне пришлось добавить дополнительные 12 мм к длине каждой фаланги из-за особенностей системы креплений.
Длина фаланг-пальцев:
- нижняя – 12,7 см (4 шт.);
- средняя – 10,2 см (4 шт.);
- верхняя – 6,4 см (4 шт.)

- нижняя фаланга – 11,4 см (2 шт.);
- средняя – 8,9 см (2 шт.).

Распустим доску 5х10 см на бруски, а затем порежем их на заготовки заданной длины. Выставим высоту режущего диска на 12 мм, а затем выберем паз шириной 19 мм на конце каждой фаланги.

Сделаем ответную часть, воспользовавшись сверлильным станком и коронкой диаметром 25 мм. Просверлим заготовки на 12 мм с обеих сторон. Затем на ленточной пиле, закруглим концы фаланг, сформировав полукруги радиусом 12 мм (кроме верхней фаланги).

Как только палец будет полностью собран, обрезаем всё лишнее, стараясь добиться более естественной формы.


Соединяем фаланги вместе, а затем сверлим сквозные отверстия под оси (гвозди в данном случае). С помощью болгарки (ножовки по металлу) отрезаем лишнее, расклепывая оставшейся конец гвоздя.


Как только все пальцы будут собраны, нужно выбрать пазы с наружной и внутренней стороны. Это довольно просто, но следует при этом не спешить.

Выставим высоту режущего диска на 6,5 мм. Такой глубины будет достаточно для того, чтобы разместить саморезы с кольцами. Проточим канавки непосредственно посредине пальцев с двух сторон.

Крепежные элементы помогут манипулировать пальцами. Крючки, установленные на наружной стороне, будут фиксировать шнур, благодаря которым пальцы и будут выпрямляться. Крючки, что установлены на внутренней стороне, будут удерживать трос, потянув за который, пальцы и будут сгибаться.
На наружной стороне, крючки будут крепиться с обеих сторон сустава. С внутренней стороны крючки размещаются в верхней части каждой фаланги. Это создаст максимальный рычаг.
Вырежем два паза (на кисти и предплечье) после чего склеим их столярным клеем. Можно усилить соединение, вкрутив по паре шурупов.

Предплечье должно быть достаточной длины, чтобы скрывать собственные руки.

Для того, чтобы скрыть элементы крепежа проточим несколько канавок, воспользовавшись гравером.


Хотелось бы, чтобы пальцы выглядели ещё более естественными и максимально мобильными. Гравер со шлифовальным диском помог довести внешний вид рук до логического конца. Если не верите, посмотрите на фотографии в начале и в конце статьи.
Задача заключается в том, чтобы установить ось (гвоздь) под правильным углом. Нарисуем на ладони линию (под нужным углом), а также точку входа. Пальцы должны крепиться последовательно. Устанавливаем большой палец в последнюю очередь.
Будьте очень осторожны при сверлении направляющих отверстий. Не спешим и делаем всё вдумчиво, ошибка может вылезти боком.
После монтажа, скорее всего, потребуется внести некоторые небольшие корректировки.


Пропускаем тросы по внутренней стороне, протянув их через кольца. Фиксируем их на верхних саморезах и кольцах для брелков. Длина троса должна быть такой, чтобы пальцы находились в разогнутом положении, компенсируя натяжения эластичного шнура.


Повторим процедуру с эластичным шнуром, протянув его по наружной стороне.


Крепим перчатку на 5 шурупах, подложив предварительно шайбы. Для удобства и комфорта, заклеим шурупы (с шайбами) пеноматериалом.






Закрепим по паре ремней на предплечьях, чтобы надежно фиксировать руки на самоделке.
Спасибо за внимание!
> Купить в подарок или заказать уникальную вещь
- Подробнее об авторе
- 15 свежих записей

About alexlevchenko
- Пробковый мушкет своими руками — 23.11.2019
- Как сделать необычную деревянную вазу своими руками — 21.11.2019
- Как выбрать комплектующие для компьютера своими руками — 18.11.2019
- Утепленная будка для домашнего питомца своими руками — 13.11.2019
- Шлифовальный столик своими руками — 10.11.2019
- Кошачье патио своими руками — 06.11.2019
- Светодиодные украшения своими руками — 04.11.2019
- Кресло букиниста своими руками — 02.11.2019
- Доработка ручного инструмента своими руками — 30.10.2019
- Бюджетный световой меч своими руками — 27.10.2019
- Домик Бабы Яги своими руками — 25.10.2019
- Обувь из железного века своими руками — 23.10.2019
- Череп своими руками — 21.10.2019
- Как сделать Nimbus 2000 своими руками — 19.10.2019
- Костюм сказочной птицы своими руками — 17.10.2019
Добавить комментарий Отменить ответ
Рубрики
Похожие мозгоподелки:
Свежие комментарии
- alexlevchenko к записи Идея уркашения детской комнаты
- Андрей Дроздовский к записи Идея уркашения детской комнаты
- Татьяна Мережко к записи Как сделать набор игральных костей своими руками
- Dallyla к записи Лазерный резак/гравер своими руками
- sTs к записи Мастер-класс: как сделать сложную шестерню

Метки
Your browser doesn’t support canvas.
Горячий ТОП за месяц














































Работая не спеша за два года я успел сделать четыре версии и получил достаточно много опыта. Описание, историю проекта и все файлы проекта вы сможете найти под катом.
Пробы и ошибки
Начиная работать над чертежами, я хотел не просто повторить uArm, а улучшить его. Мне казалось, что в моих условиях вполне можно обойтись без подшипников. Так же мне не нравилось то, что электроника вращается вместе со всем манипулятором и хотелось упростить конструкцию нижней части шарнира. Плюс я начал рисовать его сразу немного меньше.
С такими входными параметрами я нарисовал первую версию. К сожалению, у меня не сохранилось фотографий той версии манипулятора (который был выполнен в желтом цвете). Ошибки в ней были просто эпичнейшие. Во-первых, ее было почти невозможно собрать. Как правило, механика которую я рисовал до манипулятора, была достаточно простая, и мне не приходилось задумываться о процессе сборки. Но все-таки я его собрал и попробовал запустить, И рука почти не двигалась! Все детли крутились вокруг винтов и, сли я затягивал их так, чтобы было меньше люфтов, она не могла двигаться. Если ослаблял так, чтобы она могла двигаться, появлялись невероятные люфты. В итоге концепт не прожил и трех дней. И приступил к работе над второй версией манипулятора.
Красный был уже вполне пригоден к работе. Он нормально собирался и со смазкой мог двигаться. На нем я смог протестировать софт, но все-таки отсутствие подшипников и большие потери на разных тягах делали его очень слабым.
Затем» я забросил работу над проектом на какое-то время, но вскоре принял решении довести его до ума. Я решил использовать более мощные и популярные сервоприводы, увеличить размер и добавить подшипники. Причем я решил, что не буду пытаться сделать сразу все идеально. Я набросал чертежи на скорую руки, не вычерчивая красивых сопряжений и заказал резку из прозрачного оргстекла. На получившемся манипуляторе я смог отладить процесс сборки, выявил места, нуждающиеся в дополнительном укреплении, и научился использовать подшипники.
После того, как я вдоволь наигрался с прозрачным манипулятором, я засел за чертежи финальной белой версии. Итак, сейчас вся механика полностью отлажена, устраивает меня и готов заявить, что больше ничего не хочу менять в этой конструкции:
Меня удручает то, что я не смог привнести ничего принципиально нового в проект uArm. К тому времени, как я начал рисовать финальную версию, они уже выкатили 3D-модели на GrabCad. В итоге я только немного упростил клешню, подготовил файлы в удобном формате и применил очень простые и стандартные комплектующие.
Особенности манипулятора
Механика
Для сборки необходимо вырезать детали из оргстекла толщиной 5мм:
С меня за резку всех этих деталей взяли около $10.
Основание монтируется на большом подшипнике:
Особенно трудно было продумать основание с точки зрения процесса сборки, но я подглядывал за инженерами из uArm. Качалки сидят на штифте диаметром 6мм. Надо отметить, что тяга локтя у меня держится на П-образном держателе, а у uFactory на Г-образном. Трудно объяснить в чем разница, но я считаю у меня получилось лучше.
Захват собирается отдельно. Он может поворачиваться вокруг своей оси. Сама клешня сидит прямо на валу двигателя:
В конце статьи я дам ссылку на суперподробную инструкцию по сборке в фотографиях. За пару часов можно уверенно все это скрутить, если все необходимое есть под рукой. Также я подготовил 3D-модель в бесплатной программе SketchUp. Её можно скачать, покрутить и посмотреть что и как собрано.
Электроника
Чтобы заставить руку работать достаточно всего навсего подключить пять сервоприводов к Arduino и подать на них питание с хорошего источника. У uArm использованы какие-то двигатели с обратной связью. Я поставил три обычных двигателя MG995 и два маленьких двигателя с металлическим редуктором для управления захватом.
Тут мое повествование тесно сплетается с предыдущими проектами. С некоторых пор я начал преподавать программирование Arduino и для этих целей даже подготовил свою Arduino-совместимую плату. С другой стороны как-то раз мне подвернулась возможность дешево изготовить платы (о чем я тоже писал). В итоге все это закончилось тем, что я использовал для управления манипулятором свою собственную Arduino-совместимую плату и специализированный шилд.
Этот шилд на самом деле очень простой. На нем четыре переменных резистора, две кнопки, пять разъемов для сервопривода и разъем питания. Это очень удобно с точки зрения отладки. Можно загрузить тестовый скетч и записать какой-нибудь макрос для управления или что-нибудь вроде того. Ссылку для скачивания файла платы я тоже дам в конце статьи, но она подготовлена для изготовления с металлизацией отверстий, так что мало пригодна для домашнего производства.
Программирование
Самое интересное, это управление манипулятором с компьютера. У uArm есть удобное приложение для управления манипулятором и протокол для работы с ним. Компьютер отправляет в COM-порт 11 байт. Первый из них всегда 0xFF, второй 0xAA и некоторые из оставшихся — сигналы для сервоприводов. Далее эти данные нормализуются и отдаются на отработку двигателям. У меня сервоприводы подключены к цифровым входам/выходам 9-12, но это легко можно поменять.
Терминальная программа от uArm позволяет изменять пять параметров при управлении мышью. При движении мыши по поверхности изменяется положение манипулятора в плоскости XY. Вращение колесика — изменение высоты. ЛКМ/ПКМ — сжать/разжать клешню. ПКМ + колесико — поворот захвата. На самом деле очень удобно. При желании можно написать любой терминальный софт, который будет общаться с манипулятором по такому же протоколу.
Я не буду здесь приводить скетчи — скачать их можно будет в конце статьи.
Видео работы
И, наконец, само видео работы манипулятора. На нем показано управление мышью, резисторами и по заранее записанной программе.
>






