Для двигателя постоянного тока с параллельным возбуждением возможны следующие тормозные режимы работы:
1) генераторное торможение с отдачей энергии в сеть (рекуперативное торможение);
2) динамическое торможение;
3) торможение противовключением.
Режимом рекуперативного торможения называют такой режим, когда электродвигатель при определенных режимах работы привода, в силу своей обратимости, становится генератором, преобразуя кинетическую энергию движущихся масс механизма в электрическую с отдачей ее в питающую сеть.
Переход электродвигателя в генераторный режим с отдачей энергии в сеть возможен при скорости привода, превышающей скорость соответствующего идеального холостого хода. При этом ЭДС двигателя, направленная противоположно напряжению сети, становится больше его, и ток в якоре электродвигателя меняет направление на обратное. Практически режим рекуперативного торможения может быть осуществлен:
1) при наличии отрицательного статического момента нагрузки, когда электродвигатель под его действием в сторону вращения, получив ускорение, достигает скорости, превышающей скорость идеального холостого хода;
2) при переходе электродвигателя с большей скорости, полученной ослаблением потока двигателя, на меньшую за счет резкого увеличения магнитного потока.
Так как М = — МТ, то уравнение механической характеристики для данного режима будет следующим:
 (3.1)
(3.1)
Из уравнения (3.1) следует, что механические характеристики в данном режиме при различных значениях сопротивлений в якорной цепи электродвигателя являются продолжением характеристик двигательного режима в области второго квадранта (рис. 3.1). С увеличением скорости w при неизменном R величина тормозного момента возрастает. Увеличение внешнего сопротивления в цепи якоря при неизменном отрицательном статическом моменте на валу электродвигателя приводит к увеличению скорости привода.
 Рис. 3.1 Рис. 3.2 Рис. 3.1 Рис. 3.2 |
Переход из двигательного режима в режим рекуперации при резком увеличении потока возбуждения двигателя приведен на рис. 3.2.
Режимом электродинамического торможения называют такой режим работы электродвигателя, при котором его якорь отключается от питающей сети и замыкается на внешнее сопротивление, а обмотка возбуждения остается подключенной к сети. В этом режиме двигатель работает в режиме генератора с независимым возбуждением (рис. 3.3), преобразуя кинетическую энергию движущихся инерционных масс привода в электрическую, которая расходуется на нагрев сопротивлений в якорной цепи.
Уравнение механической характеристики в режиме динамического торможения можно получить из (3.1), полагая в нем напряжение сети равным нулю, U=0 :
 , (3.2)
, (3.2)
Из уравнения (1.7) видно, что механические характеристики в режиме динамического торможения расположены во втором квадранте и представляют прямые линии, проходящие через начало координат.
 |
Тормозной момент возрастает с уменьшением тормозного сопротивления и наоборот (рис. 3.4). Наибольшего тормозного эффекта можно достигнуть при замыкании якоря двигателя накоротко.
По условиям ограничения тормозного тока замыкание якоря накоротко применяется только для двигателей малой мощности, обладающих сравнительно большим сопротивлением якоря, а также для всех остальных электродвигателей при торможении на малых скоростях.
Динамическое торможение может быть использовано при тормозном спуске груза. В этом случае установившийся режим спуска будет иметь место при скорости, определяемой точкой А (рис. 3.4).
Режимом противовключения называется такой режим работы, когда при вращении электродвигателя под действием инерционных масс привода в электродвигатель из сети поступает ток такого направления, которое соответствует вращению его в противоположную сторону.
Переход из двигательного режима в режим противовключения осуществляется изменением полярности напряжения на зажимах якоря.
При изменении полярности напряжения (рис. 3.5) необходимо в цепь якоря двигателя ввести внешнее тормозное сопротивление, с тем, чтобы ток в нем, обусловленный суммой напряжения в сети и ЭДС электродвигателя, не превысил допустимого значения.
Уравнение механической характеристики для данного режима получается из (3.1) при смене знака перед напряжением:
 . (3.3)
. (3.3)
Анализ уравнения (3.3) показывает, что механические характеристики в режиме противовключения линейны и расположены во втором квадранте (рис. 3.6). С уменьшением тормозного сопротивления тормозной момент возрастает и наоборот.
  Рис. 3.5 Рис. 3.6 Рис. 3.5 Рис. 3.6 |
Режим противовключения может быть получен без изменения полярности напряжения на якоре двигателя при наличии активного момента сопротивления на его валу за счет введения в цепь якоря достаточно большого сопротивления. Установившаяся скорость вращения при этом находится в четвертом квадранте (точка А, рис. 3.6)
Пример 3
Двигатель П11. Паспортные данные двигателя: Рн=0,7кВт=700Вт; Iн=4,3А; hн=0,735; Uн=220В; nн=3000 об/мин. Рассчитать и построить естественную механическую характеристику (ЕМХ).
Определить сопротивление реостата, который нужно ввести в цепь якоря, чтобы при работе в режиме рекуперативного торможения при номинальном моменте получить n1=4200 об/мин; в режиме динамического торможения при номинальном моменте получить n2=1500 об/мин; при торможении противовключением при номинальном моменте получить n3=100 об/мин. Построить на одном графике механические характеристики для каждого режима торможения и подписать величины добавочных сопротивлений в цепи якоря.
Решение
Строим естественную механическую характеристику ДПТ параллельного возбуждения (см пример 1), по двум точкам:




Определим величину добавочного сопротивления R1 в цепи якоря для осуществления режима рекуперации с условием, чтобы при М=МН , n1=4200 об/мин(w1=441с -1 ).
 Þ
Þ 
Определим величину Е1 исходя из следующих рассуждений:
 Þ
Þ  Þ
Þ
 ;
;
 .
.
Координаты точек механической характеристики при рекуперативном торможении:

Определим величину добавочного сопротивления R2 в цепи якоря для осуществления режима динамического торможения при условии, что М=МН , n2=1500 об/мин(w2=157,5с -1 ).

При динамическом торможении якорь отключен от сети, следовательно, подводимое к якорю напряжение UH=0 , поэтому
 Þ
Þ 
Величину Е2 находим, рассуждая аналогично предыдущему случаю:


Координаты точек механической характеристики при динамическом торможении:

 .
.
Определим величину добавочного сопротивления R3 в цепи якоря для осуществления режима противовключения при условии, что М=МН , n3=100 об/мин(w3=10,5с -1 ).
В режиме противовключения UH и I меняют своё направление, поэтому
 Þ
Þ 


Координаты точек механической характеристики при противовключении:

Механические характеристики ДПТ марки П11 для различных режимов торможения, построенные по результатам расчетов, представлены на рисунке 1.10.


1 – естественная механическая характеристика (ЕМХ); 2 — механическая характеристика при рекуперативном торможении (R1=4,19Ом); 3 — механическая характеристика при динамическом торможении (R2=15,41Ом); 4 — механическая характеристика в режиме противовключения со сменой полярности (R3=45,86Ом).
Рис. 3.7 – Механические характеристики ДПТ марки П11 для различных режимов электрического торможения
Дата добавления: 2015-02-25 ; просмотров: 2968 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Электродвигателем параллельного возбуждения называется двигатель постоянного тока, обмотка возбуждения которого включена параллельно обмотке якоря (рис. 1). При снятии характеристик к цепи якоря подводится номинальное напряжение Uн=const.
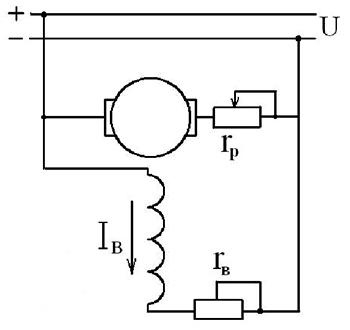
Рис. 1 — Схема двигателя параллельного возбуждения
Ток, потребляемый двигателем из сети, определяется суммой I=Ia+Iв, ток возбуждения обычно равен Iв=(0,03. 0,04) Iн. Все характеристики двигателя снимаются при постоянных сопротивлениях в цепях возбуждения rв=const и якоря
Зависимость n=f (Ia) при Uн=const и Iв=const
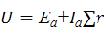
Из уравнения ЭДС для электродвигателя

Как видно из выражения,частота вращения двигателя зависит от двух факторов — изменения тока нагрузки и потока. При увеличении тока нагрузки падение напряжения в сопротивлении цепи якоря увеличивается, а частота вращения двигателя уменьшается.
Поперечная реакция якоря размагничивает двигатель, т.е. с ростом тока Ia уменьшается поток и, следовательно, увеличиваются обороты двигателя. Таким образом, оба фактора действуют в отношении оборотов машины встречно и вид скоростной характеристики будет определяется их результирующим действием.
На рис. 2 показаны три разные скоростные характеристики двигателя (кривые 1,2,3). Кривая 1 — скоростная характеристика при преобладании влияния Ia∑r,кривая 2 — оба фактора приблизительно уравновешиваются, кривая 3 — преобладает фактор размагничивающего действия реакции якоря.
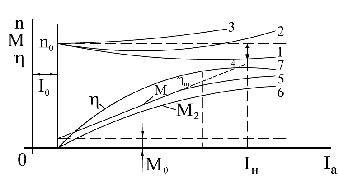
Рис. 2 — Характеристики двигателя параллельного возбуждения
Ввиду того, что в реальных двигателях изменение потока Ф незначительно, скоростная характеристика является практически прямой линией. На ряде современных машин параллельного возбуждения для компенсации влияния поперечной реакции якоря устанавливается дополнительная стабилизирующая обмотка возбуждения, которая полностью или частично компенсирует влияние реакции якоря.
Нормальной формой скоростной характеристики, при которой обеспечивается устойчивая работа двигателя, является характеристика вида кривой 1.
Наклон характеристики определяется величиной сопротивления цепи якоря Σr без учета реакции якоря. Когда добавочных сопротивлений в цепь якоря не включено, характеристика называется естественной. Естественная характеристика двигателя параллельного возбуждения достаточно жесткая. Обычно , где no — частота вращения при холостом ходе. При включении в цепь якоря добавочных сопротивлений Rрг, наклон характеристик увеличивается, они становятся «мягкими» и называются искусственными или реостатными.
Моментная характеристика – это зависимость М=f (Ia) при rв=const, U=Uн и Σr=const. В установившемся режиме работы двигателя согласно

имеем Mэм = M2+M0 = смIaФ. Если бы в процессе работы машины поток Ф не изменялся, то моментная характеристика представляла бы собой прямую (характеристика 4, рисунок 2). В действительности поток Ф с ростом тока Ia несколько уменьшается из-за размагничивающего действия реакции якоря, поэтому моментная характеристика слегка наклонена вниз (кривая 5). Характеристика полезного момента располагается ниже кривой электромагнитного момента на величину момента холостого хода (кривая 6).
Характеристика КПД η=f (Ia) снимается при U=Uн, rв=const, Σr=const и имеет типичный для электродвигателей вид (характеристика 7 на рис. 2). КПД быстро растет при увеличении нагрузки от холостого хода до 0,25Рн , достигает максимального значения при Р=(0,5. 0,75) Рн, а затем до Р=Рностается почти неизменным. Обычно в двигателях малой мощности η=0,75. 0,85, а в двигателях средней и большой мощности η=0,85. 0,94.
Механическая характеристика представляет зависимость n=f (M) при U=Uн, Iв=const и Σr=const. Аналитическое выражение для механической характеристики можно получить из уравнения ЭДС электродвигателя
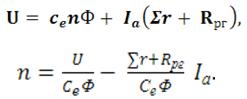
Определив ток Iа из выражения М = сеIaФ и подставив это значение тока в выражение выше, получим
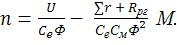
Если пренебречь реакцией якоря и считать, что поток Ф не изменяется, то механические характеристики электродвигателя параллельного возбуждения можно представить в виде прямых (рис. 3), наклон которых зависит от величины сопротивления Rрг включенного в цепь якоря. При Rрг=0 характеристика называется естественной.
Рис. 3 — Механические характеристики двигателя параллельного возбуждения
Следует помнить, что при обрыве цепи возбуждения Iв=0 обороты двигателя n→∞, т.е. двигатель идет «вразнос», поэтому его необходимо немедленно отключить от сети.
 Схема двигателя.
Схема двигателя.
Схема двигателя параллельного возбуждения изображена на рис. 1.25. Обмотка якоря и обмотка возбуждения включены параллельно. В этой схеме: I – ток, потребляемый двигателем из сети, Iя – ток якоря, Iв – ток возбуждения. Из первого закона Кирхгофа следует, что I = Iя + Iв.
Естественная механическая характеристика. Естественная механическая характеристика описывается формулой (1.6).
При холостом ходе М = 0 и nх = U/СЕФ.
Если Ф = const, то уравнение механической характеристики принимает вид:
Из (1.8) следует, что механическая характеристика (рис. 1.26, прямая 1) – прямая с углом наклона a и угловым коэффициентом b. Так как у двигателей постоянного тока Rя мало, то с увеличением нагрузки на валу частота вращения n изменяется незначительно – характеристики подобного типа называются «жесткими».
Ток, потребляемый двигателем из сети, практически растет пропорционально моменту нагрузки. Действительно, М » Мэм = См Iя Ф, и так как у двигателя параллельного возбуждения Ф = const, то Iя
Регулирование частоты вращения.
Регулирование частоты вращения возможно из (1.6) тремя способами: изменением магнитного потока главных полюсов Ф, изменением сопротивления цепи якоря Rя и изменением подводимого к цепи якоря напряжения U (изменение n за счет изменения момента нагрузки М в понятие регулирования не входит).
 Регулирование n изменением магнитного потока Ф осуществляется с помощью регулировочного реостата Rр. При увеличении сопротивления реостата ток возбуждения Iв и магнитный поток главных полюсов Ф уменьшаются. Это приводит, во-первых, к увеличению частоты вращения холостого хода nх и, во-вторых, к увеличению коэффициента b, т.е. к увеличению угла наклона механической характеристики. Однако b остается небольшим и жесткость механических характеристик сохраняется. На рис. 1.28 помимо естественной характеристики 1, соответствующей максимальному магнитному потоку Ф, приведено семейство механических характеристик 2-4, снятых при уменьшенном магнитном потоке. Из характеристик следует, что изменением магнитного потока можно только увеличивать частоту вращения относительно естественной характеристики. Практически частоту вращения таким методом можно увеличивать не более чем в 2 раза, так как увеличение скорости приводит к ухудшению коммутации и даже механическим повреждениям машины.
Регулирование n изменением магнитного потока Ф осуществляется с помощью регулировочного реостата Rр. При увеличении сопротивления реостата ток возбуждения Iв и магнитный поток главных полюсов Ф уменьшаются. Это приводит, во-первых, к увеличению частоты вращения холостого хода nх и, во-вторых, к увеличению коэффициента b, т.е. к увеличению угла наклона механической характеристики. Однако b остается небольшим и жесткость механических характеристик сохраняется. На рис. 1.28 помимо естественной характеристики 1, соответствующей максимальному магнитному потоку Ф, приведено семейство механических характеристик 2-4, снятых при уменьшенном магнитном потоке. Из характеристик следует, что изменением магнитного потока можно только увеличивать частоту вращения относительно естественной характеристики. Практически частоту вращения таким методом можно увеличивать не более чем в 2 раза, так как увеличение скорости приводит к ухудшению коммутации и даже механическим повреждениям машины.
Другой способ регулирования скорости связан с включением последовательно с якорем регулировочного реостата Rя.р (пусковой реостат Rп для этой цели непригоден, так как он рассчитан на кратковременный режим работы). Формула (1.6) при этом принимает вид:
n =  ,
,
откуда следует, что скорость при холостом ходе при любом сопротивлении Rя.р одинакова, а коэффициент b и, следовательно, наклон механических характеристик 5-7 увеличивается (рис. 1.26). Регулирование частоты вращения этим способом приводит к уменьшению частоты вращения относительно естественной характеристики. Кроме того, оно неэкономично, так как связано с большой мощностью потерь (Rя.р I ) в регулировочном реостате, по которому протекает весь ток якоря.
) в регулировочном реостате, по которому протекает весь ток якоря.
 Третий способ регулирования частоты вращения – безреостатное изменение подводимого к якорю напряжения. Он возможен только в случае, когда якорь двигателя питается от отдельного источника, напряжение которого можно регулировать. В качестве регулируемого источника применяются отдельные, специально предназначенные для данного двигателя генераторы или управляемые вентили (тиратроны, ртутные выпрямители, тиристоры). В первом случае образуется система машин, называемая системой Г-Д (генератор – двигатель), (рис. 1.27). Она применяется для плавного регулирования в широких пределах частоты вращения мощных двигателей постоянного тока и в системах автоматического управления. Система регулирования с управляемыми вентилями УВ (рис. 1.28) находит применение для регулирования частоты вращения двигателей меньшей мощности. Ее преимущество – большая экономичность.
Третий способ регулирования частоты вращения – безреостатное изменение подводимого к якорю напряжения. Он возможен только в случае, когда якорь двигателя питается от отдельного источника, напряжение которого можно регулировать. В качестве регулируемого источника применяются отдельные, специально предназначенные для данного двигателя генераторы или управляемые вентили (тиратроны, ртутные выпрямители, тиристоры). В первом случае образуется система машин, называемая системой Г-Д (генератор – двигатель), (рис. 1.27). Она применяется для плавного регулирования в широких пределах частоты вращения мощных двигателей постоянного тока и в системах автоматического управления. Система регулирования с управляемыми вентилями УВ (рис. 1.28) находит применение для регулирования частоты вращения двигателей меньшей мощности. Ее преимущество – большая экономичность.
Регулирование частоты вращения изменением U практически возможно только в сторону уменьшения, так как увеличение напряжения выше номинального недопустимо из-за резкого ухудшения коммутации. Из (1.9) следует, что при уменьшении напряжения уменьшается скорость холостого хода nх, а наклон механических характеристик 8-10 не изменяется (см. рис. 1.26), они остаются жесткими даже при низких напряжениях. Диапазон регулирования (nmax/nmin) таким способом 6:1-8:1. Он может быть значительно расширен при применении специальных схем с обратными связями.
Регулировочная характеристика.
Регулировочная характеристика n=f(Iв) двигателя параллельного возбуждения изображена на рис. 1.29.
Ее характер определяется зависимостью (1.5), из которой следует, что частота вращения обратно пропорциональна магнитному потоку и, следовательно, току возбуждения Iв. При токе возбуждения Iв = 0, что может быть при обрыве цепи возбуждения, магнитный поток равен остаточному Фост и частота вращения становится настолько большой, что двигатель может механически разрушиться, – подобное явление называется разносом двигателя.
Физически явление разноса объясняется тем, что вращающий момент (1.2) при уменьшении магнитного потока, казалось бы, должен уменьшиться, однако ток якоря Iя = (U – E)/Rя увеличивается значительнее, так как уменьшается Е (1.1) и разность U – E увеличивается в большей степени (обычно Е » 0,9 U).
 Тормозные режимы.
Тормозные режимы.
Тормозные режимы двигателя имеют место тогда, когда электромагнитный момент, развиваемый двигателем, действует против направления вращения якоря. Они могут возникать в процессе работы двигателя при изменении условий работы или создаваться искусственно с целью быстрого уменьшения скорости, остановки или реверсирования двигателя.
У двигателя параллельного возбуждения возможны три тормозных режима: генераторное торможение с возвратом энергии в сеть, торможение противовключением и динамическое торможение.
Генераторное торможение возникает в тех случаях, когда частота вращения якоря n становится больше частоты вращения при идеальном (т.е. при Мпр = 0) холостом ходе nx (n>nx). Переход в этот режим из режима двигателя возможен, например, при спуске груза, когда момент, создаваемый грузом, приложен к якорю в том же направлении, что и электромагнитный момент двигателя, т.е. тогда, когда момент нагрузки действует согласно с электромагнитным моментом двигателя и он набирает скорость, большую чем nx. Если n>nx, то Е>Uc (где Uc – напряжение сети) и ток двигателя изменяет свой знак (1.4) – электромагнитный момент из вращающего становится тормозным, а машина из режима двигателя переходит в режим генератора и отдает энергию в сеть (рекуперация энергии). Переход машины из двигательного режима в генераторный иллюстрируется механической характеристикой (рис. 1.30). Пусть в двигательном режиме a1 – рабочая точка; ей соответствует момент М. Если частота вращения увеличивается, то рабочая точка по характеристике 1 из квадранта I переходит в квадрант II, например, в рабочую точку a2, которой соответствует частота вращения n΄ и тормозной момент – М΄.
Торможение противовключением возникает в работающем двигателе, когда направление тока в якоре или тока возбуждения переключается на противоположное. Электромагнитный момент при этом изменяет знак и становится тормозным.
Работе двигателя с противоположным направлением вращения соответствуют механические характеристики, располагающиеся в квадрантах II и III (например, естественная характеристика 2 на рис. 1.30).
Внезапный переход на эту характеристику практически недопустим, так как сопровождается чрезмерно большим броском тока и тормозного момента. По этой причине одновременно с переключением одной из обмоток в цепь якоря включается добавочное сопротивление Rдоб, ограничивающее ток якоря.
Механическая характеристика режима с Rдоб имеет большой наклон (прямая 3). При переходе в режим противовключения частота вращения n в первый момент измениться не может (из-за инерционности якоря) и рабочая точка из положения a1 перейдет в положение a3 на новой характеристике. Из-за появления Мтор частота вращения n будет быстро падать до тех пор, пока рабочая точка a3 не перейдет в положение a4, соответствующее остановке двигателя. Если в этот момент двигатель не отключить от источника питания, то якорь изменит направление вращения. Машина начнет работать в двигательном режиме с новым направлением вращения, а ее рабочая точка a5 будет находиться на механической характеристике 3 в квадранте III.
 Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т. Уравнение характеристики (1.6) принимает вид:
Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т. Уравнение характеристики (1.6) принимает вид:
n = 
что соответствует семейству прямых 4 (при разных Rд.т), проходящих через начало координат. При переключении в этот режим рабочая точка a1 переходит на одну из характеристик 4, например, в точку a6, а затем перемещается по прямой 4 до нуля. Якорь двигателя тормозится до полной остановки. Изменением сопротивления Rд.т можно регулировать ток якоря и скорость торможения.






