Содержание
астоту n1 называют также синхронной. Частота вращения ротора n зависит от режима работы машины и при работе в двигательном режиме находится в пределах 0
Рассмотрим работу асинхронной машины в различных режимах, которые возникают в диапазоне частот вращения ротора 0
Разность скоростей вращения магнитного поля статора и ротора асинхронного двигателя характеризуется величиной скольжения s = (n1 — n2) / n2, где n1- синхронная скорость вращения поля, об/мин, n2 — скорость вращения ротора асинхронного двигателя, об/мин.
Действующее значение ЭДС, наводимой этим полем в одной фазе обмотки статора определяется выражением:
где: k1=0.92÷0.98 –обмоточныйкоэффициент; f1=f –частотасети; w1 – число витков одной фазы обмотки статора; Φ – результирующее магнитное поле в машине.
Запишем уравнение равновесия для одной фазы короткозамкнутого ротора.
При неподвижном роторе.

При вращающемся роторе.

49. Механические и рабочие характеристики асинхронного двигателя.
Под механической характеристикой принято понимать зависимость частоты вращения ротора в функции от электромагнитного моментаn=f(M). Эту характеристику (рис. 2.15) можно получить, используя зависимость M=f(S) и пересчитав частоту вращения ротора при разных значениях скольжения.
Рабочими характеристиками называются зависимости частоты вращения n (или скольжения s), момента на валу М, тока статора  , КПД и
, КПД и  от полезной мощности
от полезной мощности  при
при  и
и  . Рабочие характеристики можно получить опытным либо расчетным путем. Ниже приводится алгоритм расчета рабочих характеристик по схеме замещения. Задается скольжение s в рабочем диапазоне
. Рабочие характеристики можно получить опытным либо расчетным путем. Ниже приводится алгоритм расчета рабочих характеристик по схеме замещения. Задается скольжение s в рабочем диапазоне  . Для каждого значения s внутри этого диапазона рассчитываются следующие величины.
. Для каждого значения s внутри этого диапазона рассчитываются следующие величины.
50. Устройство трехфазной синхронной машины
Статор синхронной машины устроен так же, как асинхронной. В пазы пакета из листов электротехнической стали уложены катушки трехфазной обмотки, токи которой создают вращающееся магнитное поле. Обмотку статора обычно соединяют звездой. Ротор синхронной машины представляет собой электромагнит. Обмотку ротора, которую называют обмоткой возбуждения, подключают через два контактных кольца и щетки к независимому источнику постоянного напряжения.
51. Принцип действия трехфазного синхронного генератора. Эдс и электромагнитный момент. Внешняя характеристика.
Рис. 1.1. Внешние характеристики трехфазного синхронного генератора при изменении нагрузки с заданным коэффициентом мощности нагрузки: а — от режима холостого хода до номинальной; б — от номинальной до режима холостого хода.
На рис. 1 показаны внешние естественные характеристики трехфазного синхронного генератора, иллюстрирующие зависимость напряжения U г на его зажимах от тока обмотки статора Ir при заданном коэффициенте мощности приемников соs φ = const, неизменном токе возбуждения в обмотке ротора IB = const и постоянной частоте вращения ротора, чему отвечает неизменная частота переменного тока f=const. Первые характеристики позволяют определить изменение напряжения генератора при увеличении нагрузки от режима холостого хода до номинального тока, а вторые — при снижении нагрузки от номинальной до режима холостого хода. Основной естественной внешней характеристикой синхронного генератора считают кривую Uг (Iг), полученную при симметричном режиме, коэффициенте мощности приемников cos φ = 0,8 и φ > 0. Основными характеристиками синхронного генератора, работающего на автономную нагрузку, являются характеристики: холостого хода, короткого замыкания, внешняя, регулировочная и нагрузочная. Электромагнитный момент синхронного генератора определяется выражение При вращении ротора магнитный поток полюсов пересекает статорную обмотку и наводит в ней ЭДС по закону электромагнитной индукции:E = 4,44*f*w*kw*Ф
При вращении ротора магнитный поток полюсов пересекает статорную обмотку и наводит в ней ЭДС по закону электромагнитной индукции:E = 4,44*f*w*kw*Ф
Частота индуктированной ЭДС (напряжения, тока) синхронного генератора: f = p*n/60. Таким образом, как и у любого генератора, основанного на законе электромагнитной индукции, индуктированная ЭДС пропорциональна магнитному потоку машины и скорости вращения ротора.
Принцип: Приводной двигатель развивает момент, вращая ротор генератора с частотой. По обмотке ротора протекает постоянный ток, её МДС создает магнитный поток ротора. Вращаясь вместе с ротором относительно статора, поток в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в каждой фазе обмотки статора ЭДС. При замкнутой внешней цепи по обмоткам статора протекает ток нагрузки I, который, в свою очередь, образует МДС статора. МДС создает магнитный поток реакции якоря и поток рассеяния, который замыкается поперёк пазов статора и вокруг лобовых частей обмотки статора. Потоки и наводят в обмотке статора соответственно ЭДС .
52. Принцип действия трехфазного синхронного двигателя. Вращающий электромагнитный момент. Синхронный двигатель может работать в качестве генератора и двигателя. Синхронный двигатель выполнен так же, как и синхронный генератор. Его обмотка якоря подключена к источнику трехфазного переменного тока; в обмотку возбуждения подается от постороннего источника постоянный ток. Благодаря взаимодействию вращающегося магнитного поля созданного трехфазной обмоткой якоря, и поля, созданного обмоткой возбуждения, возникает электромагнитный момент приводящий ротор во вращение. Однако в синхронном двигателе в отличие от асинхронного ротор будет разгоняться до частоты вращения n = n1, с которой вращается магнитное поле (до синхронной частоты вращения). Объясняется это тем, что ток в обмотку ротора подается от постороннего источника, а не индуцируется в нем магнитным полем статора и, следовательно, не зависит от частоты вращения вала двигателя. Характерной особенностью синхронного двигателя является постоянная частота вращения его ротора независимо от нагрузки.
Электромагнитный момент в синхронном двигателе возникает в результате взаимодействия магнитного потока ротора (потока возбуждения Фв) с вращающимся магнитным полем, создаваемым трехфазным током, протекающим по обмотке якоря (потоком якоря Фв). При холостом ходе машины оси магнитных полей статора и ротора совпадают . Поэтому электромагнитные силы I, возникающие между «полюсами» статора и полюсами ротора, направлены радиально и электромагнитный момент машины равен нулю. При работе машины в двигательном режиме ее ротор под действием приложенного к валу внешнего нагрузочного момента Мвн смещается на некоторый угол 0 против направления вращения. В этом случае в результате электромагнитного взаимодействия между ротором и статором создаются электромагнитные силы I, направленные по направлению вращения, т. е. образуется вращающий электромагнитный момент М, который стремится преодолеть действие внешнего момента Мвн. Максимум момента Мmax соответствует углу ? = 90°, когда оси полюсов ротора расположены между осями «полюсов» статора
53. Свойства полупроводников. Собственная и примесная проводимости. Электронно-дырочный переход. Полупроводни́к — материал, который по своей удельной проводимости занимает промежуточное место между проводниками и диэлектриками и отличается от проводников сильной зависимостью удельной проводимости от концентрации примесей, температуры и воздействия различных видов излучения. Свойства : 1) С повышением температуры удельное сопротивление полупроводников уменьшается, в отличие от металлов, у которых удельное сопротивление с повышением температуры увеличивается. 2) Свойство односторонней проводимости контакта двух полупроводников. 3) Контакты различных полупроводников в определенных условиях при освещении или нагревании являются источниками фото — э. д. с. или, соответственно, термо — э. д. с.
По характеру проводимости различают : Собственная проводимость — полупроводники, в которых свободные электроны и "дырки" появляются в процессе ионизации атомов, из которых построен весь кристалл, называют полупроводниками с собственной проводимостью. В полупроводниках с собственной проводимостью концентрация свободных электронов равняется концентрации "дырок". 
Примесная проводимость — Для создания полупроводниковых механизмов используют кристаллы с примесной проводимостью. Такие кристаллы изготовляются с помощью внесения смесей с атомами трехвалентного или пятивалентного химического элемента.
p-n-Переход или электронно-дырочный переход — область пространства на стыке двух полупроводниковp-иn-типа, в которой происходит переход от одного типа проводимости к другому. p-n-Переход является основой для полупроводниковыхдиодов,триодови других электронных элементов с нелинейнойвольт-амперной характеристикой.
54. Электронные выпрямительные преобразователи. Выпрямитель (электрического тока) — преобразователь электрической энергии; механическое, электровакуумное, полупроводниковое или другое устройство, предназначенное для преобразования переменного входного электрического тока в постоянный выходной электрический ток. Большинство выпрямителей создаёт не постоянные, а пульсирующие однонаправленные напряжение и ток, для сглаживания пульсаций которых применяют фильтры. Выпрямители обычно используются там, где нужно преобразовать переменный ток в постоянный ток.
55. Транзисторы. Транзи́стор, полупроводниковый триод — радиоэлектронный компонент из полупроводникового материала, обычно с тремя выводами, позволяющий входным сигналам управлять током в электрической цепи. Обычно используется для усиления, генерации и преобразования электрических сигналов. В общем случае транзистором называют любое устройство, которое имитирует главное свойство транзистора изменения сигнала между двумя различными состояниями при изменении сигнала на управляющем электроде. В полевых и биполярных транзисторах управление током в выходной цепи осуществляется за счёт изменения входного напряжения или тока. Небольшое изменение входных величин может приводить к существенно большему изменению выходного напряжения и тока. Это усилительное свойство транзисторов используется в аналоговой технике.
Обозначение транзисторов разных видов.  -p-n-p,
-p-n-p,  -n-p-n/
-n-p-n/
56. Электронные усилители. Электронный усилитель — усилитель электрических сигналов, в усилительных элементах которого используется явление электрической проводимости в газах, вакууме и полупроводниках. Электронный усилитель может представлять собой как самостоятельное устройство, так и блок (функциональный узел) в составе какой-либо аппаратуры — радиоприёмника, магнитофона, измерительного прибора и т. д.
Усилитель представляет собой в общем случае последовательность каскадов усиления (бывают и однокаскадные усилители), соединённых между собой прямыми связями. В большинстве усилителей кроме прямых присутствуют и обратные связи (межкаскадные и внутрикаскадные). Отрицательные обратные связи позволяют улучшить стабильность работы усилителя и уменьшить частотные и нелинейные искажения сигнала.
57. Тиристоры. Тири́стор — полупроводниковый прибор, выполненный на основе монокристалла полупроводника с тремя или более p-n-переходами и имеющий два устойчивых состояния: закрытое состояние, то есть состояние низкой проводимости, и открытое состояние, то есть состояние высокой проводимости. Тиристор можно рассматривать как электронный выключатель (ключ). Основное применение тиристоров — управление мощной нагрузкой с помощью слабых сигналов, а также переключающие устройства. Существуют различные виды тиристоров, которые подразделяются, главным образом, по способу управления и по проводимости. Различие по проводимости означает, что бывают тиристоры, проводящие ток в одном направлении и в двух направлениях.
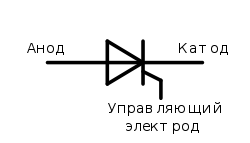 — Обозначение на схема
— Обозначение на схема
Во всех режимах работы асинхронный машин всегда присутствует вращающееся магнитное поле статора. Оно создаётся тремя обмотками, сдвинутыми в пространстве относительно друг друга на 120 градусов, скорость этого вращения равна:

Формула скорости вращения магнитного поля статора
n1 – Скорость вращения магнитного поля статора;
f – Частота питающей сети (50Гц);
p – Количество пар полюсов (max 12 min 2);
Из формулы понятно, что скорость вращения магнитного поля статора асинхронной машины зависит от: частоты питающей сети, на территории стран СНГ она постоянна и равняется 50Гц, от количества пар полюсов в статоре асинхронной машины. Скорость вращения ротора синхронной машины напрямую зависит от скорости вращения магнитного поля статора.
Так же известно, что в их конструкции присутствует ротор, вращающаяся часть, которая может вращаться с различными скоростями. В целом можно сказать, что в асинхронных машинах скорость вращения изменяется только у ротора. Многочисленные наблюдения показали, что в зависимости от частоты вращения ротора асинхронной машины, с ней происходят различные явления. Для упрощения понимания этого вопроса, был введен параметр скольжение S – разность скоростей вращения магнитного поля статора, от скорости вращения ротора:

Эти скорости обозначают буквенно: n – скорость вращения ротора; n1 – скорость вращения магнитного поля.
Режим работы асинхронной машины зависит именно от этого значения разности скоростей вращения магнитного поля статора и скорости вращения ротора.
Различают следующие режимы работы асинхронных машин:
- Режим двигателя;
- Режим генератора;
- Режим электромагнитного тормоза;
- Режим динамического торможения;
Режим двигателя
Асинхронные двигатели стали очень популярна и наиболее часто применяемая в электроприводах. Режим электродвигателя применяется для приведения во вращение различные устройства, механизмы, насосы, лебедки, редуктора и т.д. путем преобразования электрической энергии в механическую. Как уже многим известно, что её принцип действия объясняется взаимодействием двух магнитных полей статора и ротора. Магнитное поле статора создается системой трехфазных обмоток и магнитопровода, расположенных непосредственно на статоре (корпусе асинхронной машины). Это поля является вращающимся, так как в трех фазной цепи, ток протекает из фазы А в фазу В, из фазы В в фазу С, а из фазы С обратно в фазу А. Обмотки каждой фазы располагают на статоре так, что бы равномерно заполнить всю окружность, т.е. окружность занимает 360 градусов, имея три обмотки, делим 360/3 получаем 120 градусов на каждую обмотку.

Это вращающееся магнитное поле пронизывая ротор, индуцирует в нем ЭДС, так как ротор короткозамкнутый, то по нему протекает ток. Протекание тока вызывает образование у ротора собственного магнитного поля. Поле статора, которое вращается с скоростью n1 взаимодействует с полем ротора, которое является неподвижным, и старается остановить, затормозить поле статора. Так как ротор закреплен на подшипниках, он способен свободно вращаться вокруг своей оси. Получается, что магнитное поля статора притягивает поле ротора, увлекает его за собой с определенной силой, в результате чего и сам ротор начинает вращаться.
Особенностью этого режима является то, что скорость вращения магнитного поля статора и скорость вращения ротора не должны быть равными, тем более, скорость ротора всегда меньше. Если же каким-либо образом их скорости будут равными, то исходя из явления электромагнитной индукции, обязательна разность магнитного потока, пересекающего тот или иной контур, что и обеспечивается отставанием ротора от магнитного поля статора. Если же все-таки их скорости сравняются, по короткозамкнутой обмотке ротора перестанет протекать электрический ток, исчернит его магнитное поле и ротор не будит увлекаться полем статора. Скольжение в режиме электродвигателя должно быть положительным числом и не равным нулю.
Стоит добавить, что режим двигателя у асинхронных машин является самым часто используемым.
Режим генератора
Режим генератора у асинхронных машин является полной противоположностью режиму двигателя. Самым главным отличием является то, что при режиме двигателя, асинхронная машина потребляет из сети электрическую энергию. А в режиме генератора наоборот отдает в сеть выработанную электрическую энергию.
Режим генератора возможен только тогда, когда скорость вращения ротора n будет выше скорости вращающегося магнитного поля статора. В этом случаи скольжение S будит отрицательным. Для этого необходимо ускорить ротор синхронной машины, то есть посадить на вал ротора, какой-либо механизм (турбина, редуктор, другой двигатель).

Допустим ротор мы разогнали до 3500 оборотов в минуту, а скорость магнитного поля статора 3000 оборотов в минуту, определим скольжение:
Режим генератора у асинхронных машин не является часто используемым, и может применяться в узких специализированных областях, в маломощных электростанциях.
Стоит отметить, что при таком режиме работы, отдаваемая в сеть электроэнергия совпадает по частоте с частотой самой сети. Так как она зависит только от частоты вращения магнитного поля статора, которая как мы знаем не изменяется.
В использовании таких генераторов есть огромный плюс, в его устройстве отсутствуют скользящие контакты, вращающиеся обмотки, это обеспечивает надежную и долговременную эксплуатацию. Так же эти генераторы мало восприимчивы к коротким замыканиям в сети. Еще не маловажным условием работы является, наличие остаточной намагниченности ротора, которое усиливается конденсаторными установками, включенными в цепи статорных обмоток.
Режим электромагнитного торможения
Режим электромагнитного торможения является еще более специфичными специализированным. Вся суть этого режима в том, что если вращение ротора асинхронной машины не совпадает с направлением вращения магнитного поля статора, то ротор будит затормаживаться под действием этого магнитного поля статора. Такой режим возможен только при реверсивном подключении асинхронной машины, так как путем переключения двух фаз достигается изменение направления вращения магнитного поля статора, и используется в различных грузоподъемных и транспортировочных устройствах. Этот режим часто называют режимом торможения противотоком или противовключением. При таком режиме, если нам необходимо остановить двигатель, при полной остановке, статор необходимо отключить от сети, так как вал начнет вращаться в обратном направлении.
Режим динамического торможения
В таком режиме, асинхронная машина отключается от трех фазной сети, и на обмотки статора подается постоянный ток. Таким образом на статоре образуется постоянное магнитное поле (постоянный магнит), которое тормозит ротор двигателя.
Все выше представленные режимы работы асинхронных машин, кроме режима двигателя, являются специализированными, и используются только в определенных установках, устройствах, станках и т.д.
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.

Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
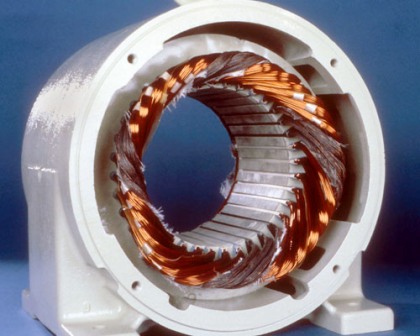
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор. По внешнему виду статора, по расположению обмоток, по количеству пазов, — можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра. Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
Про асинхронные электродвигатели (смотрите — Виды электродвигателей) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса. Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой. Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья — черным. Обмотки всех трех фаз устроены одинаково. Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения. В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
1500 оборотов в минуту

Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту
Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).






