Режимы работы асинхронных двигателей. Холостой ход. Если пренебречь трением и магнитными потерями в стали (идеализированная машина), то ротор асинхронного двигателя при холостом ходе вращался бы с синхронной частотой n=n1 в ту же сторону, что и поле статора; следовательно, скольжение было бы равно нулю. Однако в реальной машине частота вращения ротора n при холостом ходе никогда не может стать равной частоте вращения n1, так как в этом случае магнитное поле перестанет пересекать проводники обмотки ротора и в них не возникнет электрический ток. Поэтому двигатель в этом режиме не может развить вращающего момента и ротор его под влиянием противодействующего момента сил трения начнет замедляться. Замедление ротора будет происходить до тех пор, пока вращающий момент, возникший при уменьшенной частоте вращения, не станет равным моменту, создаваемому силами трения. Обычно при холостом ходе двигатель работает со скольжением s = 0,2-0,5 %.
При холостом ходе в асинхронном двигателе имеют место те же электромагнитные процессы, что и в трансформаторе (обмотка статора аналогична первичной обмотке трансформатора, а обмотка ротора—вторичной обмотке). По обмотке статора проходит ток холостого хода I0, однако его значение в асинхронном двигателе из-за наличия воздушного зазора между ротором и статором значительно больше, чем в трансформаторе (20—40 % номинального тока по сравнению с 3—10 % у трансформатора). Для уменьшения тока I0 в асинхронных двигателях стремятся выполнить минимально возможные по соображениям конструкции и технологии зазоры. Например, у двигателя мощностью 5 кВт зазор между статором и ротором обычно равен 0,2—0,3 мм. Ток холостого хода, так же как и в трансформаторе, имеет реактивную и активную составляющие. Реактивная составляющая тока холостого хода (намагничивающий ток) обеспечивает создание в двигателе требуемого магнитного потока, а активная составляющая — передачу в обмотку статора из сети энергии, необходимой для компенсации потерь мощности в машине в этом режиме.
Нагрузочный режим. Чем больше нагрузочный момент на валу, тем больше скольжение и тем меньше частота вращения ротора. Увеличение скольжения при возрастании момента объясняется
 Рис. 260. Энергетическая диаграмма асинхронного двигателя
Рис. 260. Энергетическая диаграмма асинхронного двигателя
следующим образом. При увеличении нагрузки на валу ротора он начинает тормозиться и частота его вращения т уменьшается. Но одновременно увеличивается частота n1— n персечения вращающимся полем проводников обмотки ротора, а следовательно, э. д. с. Е2, индуцированная в этой обмотке, ток в роторе I2 и образованный им электромагнитный вращающий момент М. Этот процесс будет продолжаться до тех пор, пока электромагнитный момент двигателя M не сравняется с нагрузочным моментом Мвн. При достижении равенства моментов М = Мвн торможение прекратится и двигатель будет снова вращаться с постоянной частотой вращения, но меньшей, чем до увеличения нагрузки. При уменьшении нагрузочного момента Мвн частота вращения ротора по той же причине будет увеличиваться. Обычно при номинальной нагрузке скольжение для двигателей средней и большой мощности составляет 2—4 %, а для двигателей малой мощности от 5 до 7,5 %.
При работе двигателя под нагрузкой по обмоткам его статора и ротора проходят токи i1 и i2. Частота тока в обмотках статора f1 и ротора f2 определяется частотой пересечения вращающимся магнитным полем проводников соответствующей обмотки. Обмотка статора пересекается магнитным полем с частотой n1, а обмотка вращающегося ротора — с частотой n1 — n. Следовательно,
Передача электрической энергии из статора в ротор происходит так же, как и в трансформаторе. Двигатель потребляет из сети электрическую мощность Pэл = 3U1I1cos?1 и отдает приводимому им во вращение механизму механическую мощность Рмх (рис. 260). В процессе преобразования энергии в машине имеют место потери мощности: электрические в обмотках статора ?Рэл1 и ротора ?Рэл2, магнитные ?Рм от гистерезиса и вихревых токов в ферромагнитных частях машины и механические ?Рмх от трения в подшипниках и вращающихся частей о воздух. Из статора в ротор вращающимся электромагнитным полем передается электромагнитная мощность Pэм роторе она превращается в механическую мощность ротора Р’мх. Полезная механическая мощность на валу двигателя Pмх меньше мощности Р’мх на значение потерь мощности на трение ?Рмх.
При возрастании механической нагрузки на валу двигателя увеличивается ток I2. В соответствии с этим возрастает и ток I1 в обмотке статора.
Электромагнитный момент М создается в асинхронном двигателе в результате взаимодействия вращающегося магнитного поля с током I2, индуцируемым им в проводниках обмотки статора. Однако в создании его участвует не весь ток I2, а только его активная составляющая I2cos?2 (здесь ?2 — угол сдвига фаз между током I2 и э. д. с. Е2 в обмотке ротора). Поэтому
Фт — амплитуда магнитного потока, созданного обмоткой статора;
cм — постоянная, определяемая конструктивными параметрами данной машины и не зависящая от режима ее работы.
Поясним физический смысл формулы (84). На рис. 261 изображен ротор двухполюсного асинхронного двигателя в развернутом виде, на котором кружками показаны поперечные сечения проводников. Крестики и точки внутри проводников обозначают направление в них тока i2, а под проводниками — направление индуцированных э. д. с. e2, которые пропорциональны индукции В в данной точке воздушного зазора между статором и ротором. Кривая В показывает распределение вдоль окружности ротора индукции, создаваемой вращающимся магнитным полем, кривая i2 — распределение тока в проводниках, а кривая f — распределение электромагнитных сил, возникающих в результате взаимодействия тока (а с вращающимся магнитным полем. Электромагнитный вращающий момент М, создаваемый в результате совместного действия всех сил f, будет пропорционален среднему значению электромагнитной силы fср. Легко заметить, что к проводникам, лежащим на дуге, равной 180° — ?2, приложены силы f, увлекающие ротор за вращающимся магнитным полем, а на дуге ?2 — тормозящие силы. Поэтому при неизменном токе I2 среднее значение электромагнитной силы fср, а следовательно, и электромагнитный момент М будут тем больше, чем меньше угол ?2. Электромагнитный момент М зависит от скольжения s.
 Рис. 261. Распределение индукции В, тока i2 и электромагнитных сил f, действующих на проводники асинхронного двигателя
Рис. 261. Распределение индукции В, тока i2 и электромагнитных сил f, действующих на проводники асинхронного двигателя
Так, при увеличении скольжения возрастает э. д. с. Е2 в обмотке ротора и ток I2. Однако одновременно уменьшается cos?2, так как активное сопротивление обмотки ротора R2 остается неизменным, а реактивное Х2 увеличивается (возрастает частота тока f2 в обмотке ротора).
Подписка на рассылку
Электродвигатель переходит в режим холостого хода, когда с его вала снимают рабочую нагрузку. В этом случае можно определить такие важные параметры функционирования устройства, как намагничивающий ток, мощность и коэффициент потерь в элементах конструкции привода. Но главное – в режиме холостого хода можно определить исправность устройства.
Так, электродвигатель на холостом ходу греться не должен. Но в некоторых случаях температура привода повышается – и это сигнализирует о неполадках, которые впоследствии могут проявить себя.
Параметры холостого хода электродвигателя
Как было сказано выше, холостой ход – это режим работы асинхронного электродвигателя, при котором на валу нет нагрузки. В этом случае устройство с точки зрения электротехники схоже с трансформатором. Но главное – оно потребляет меньше электроэнергии, что особенно важно для контроля правильности работы мотора.
В частности, ток холостого хода асинхронного электродвигателя в зависимости от мощности и частоты вращения составляет в среднем 20-90% от номинального. Существует таблица, в которой указаны данные значения.
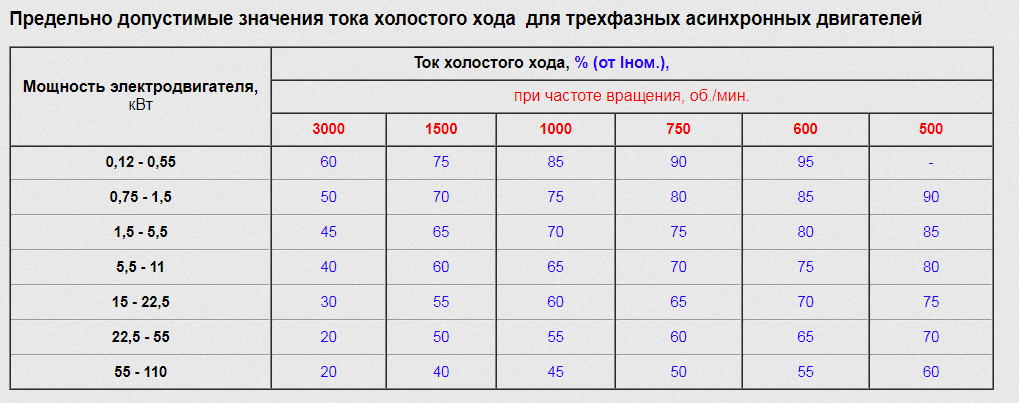
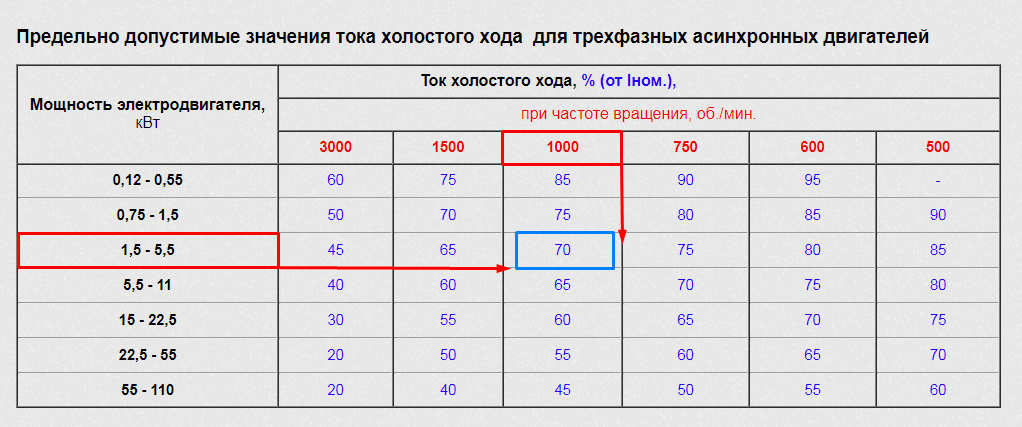
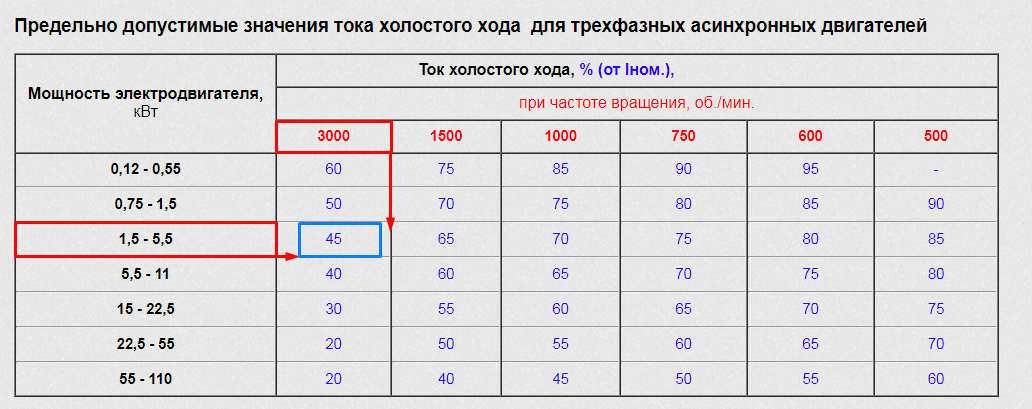
Так, например, ток холостого хода электродвигателя на 5 кВт при частоте вращения в 1000 оборотов в минуту составляет 70% от номинального (см. рис. 2). При частоте вращения 3000 оборотов в минуту – всего 45% от номинального (см. рис. 3). Это важно учесть, так как если фактическая сила тока значительно расходится с расчётной, то это сигнализирует о неполадках.
Стоит отметить, что параметры работы двигателя обычно указаны в прилагаемой к нему документации или могут быть получены посредством расчётов.
Что делать, если греется электродвигатель на холостом ходу
Электродвигатель на холостом ходу греться не должен. Допускается лишь незначительное увеличение температуры, обусловленное естественными причинами – появление трения в подшипниках на валу ротора и сопротивление в обмотке. А вот заметный нагрев сигнализирует в первую очередь о неполадках в устройстве.
Чаще всего нагревается асинхронный электродвигатель на холостом ходу из-за межвиткового замыкания в обмотках. Это требует срочного ремонта. Ведь при повышении нагрузок межвитковое замыкание может привести к перегреву и выгоранию обмотки – и, как следствие, повреждению как самого ЭД, так и конструкции, в которую он установлен.
Ещё одна возможная причина нагрева ЭД в этом режиме – эксплуатация в нештатных условиях. Например, превышение напряжения. В этом случае необходимо срочно отключить питание двигателя, так как из-за перегрева может возникнуть межвитковое замыкание в обмотках или замыкание обмотки на корпус двигателя.
Реже нагрев ЭД наблюдается из-за затруднённого движения ротора. Стоит убедиться, что подшипники работают нормально, а между обмотками ротора и статора не попали загрязнения.
Частота вращения магнитного поля статора асинхронного двигателя (синхронная частота), об/мин:

где /| — частота напряжения питательной сети, Гц; р — число пар полюсов обмотки двигателя.
Частота вращения ротора (асинхронная частота) п зависит от режима работы двигателя и находится в пределах 0 / 1/1Ф, (3.4)
где Ех — ЭДС фазы обмотки статора, В; К0б1 — обмоточный коэффициент обмотки статора, учитывающий особенности его конструкции (для двигателей малой мощности Ко61 = 0,95—0,96); И / 1 — число витков в обмотке фазы статора; Ф — основной вращающийся магнитный поток, Вб.
ЭДС фазы обмотки ротора, В:
где Ко52 — обмоточный коэффициент обмотки ротора; С2 — число витков в обмотке фазы ротора (для короткозамкнутого ротора обмоткой является стержень, у которого ?2 = 0,5).
Индекс «5» обозначает вращающийся ротор. В неподвижном роторе частота ЭДС /2=/, т. е. такая же, как у ЭДС обмотки статора.
Вращающий момент асинхронного двигателя создается в результате взаимодействия вращающегося магнитного поля статора с токами в проводниках обмотки ротора. Он определяется следующим выражением [1] :
где М — вращающий (электромагнитный) момент асинхронного двигателя, Н • м; /2 — ток в обмотке ротора, А; с — конструктивная постоянная двигателя, зависящая от числа его полюсов и фаз, числа витков обмотки статора и конструктивного выполнения обмотки ротора; у — фазный угол между ЭДС и током в обмотке ротора.
При условии постоянства приложенного напряжения магнитный поток остается почти постоянным при любом изменении нагрузки двигателя и, следовательно, вращающий момент будет пропорционален только активной составляющей тока в обмотке ротора (/2соз у2).
Изменение нагрузки (тормозного момента) на валу двигателя изменит частоту вращения ротора и скольжение, что, в свою очередь, вызовет изменение как тока в роторе, так и его активной составляющей.
На рис. 3.2 показана зависимость вращающего момента асинхронного двигателя от скольжения. При некотором скольжении ?кр (примерно 20 %) двигатель развивает максимальный момент, определяющий его перегрузочную способность, которая для серийных двигателей равна 1,7—3,4. Устойчивая работа двигателя возможна только на участке графика при скольжениях 5 5кр увеличение скольжения будет вызы-

Рис. 3.2. Зависимость вращающего момента асинхронного двигателя от скольжения: Мкр, Мном, Мпуск — критический, номинальный и пусковой вращающие моменты; 5Н0М и 5кр — номинальное и критическое скольжение; О. Н, К, П — точки графика, которые соответствуют следующим режимам работы двигателя: идеальный холостой ход, номинальный, критический, останов ротора
вать уменьшение вращающего момента вследствие значительного увеличения реактивного сопротивления обмотки ротора.
На рис. 3.2 точка О соответствует идеальному холостому ходу двигателя, а точка Н номинальному режиму. Участок ОН графика — рабочий участок. Участок НК графика соответствует механической перегрузке двигателя. В точке К вращающий момент достигает максимального значения, и его называют критическим моментом. Скольжение, соответствующее критическому скольжению, называется критическим скольжением. Участок ОК графика — участок устойчивой работы двигателя, под которой понимается свойство двигателя автоматически компенсировать малые отклонения в режиме работы за счет собственных характеристик. Участок КП — участок неустойчивой работы. Если допустить, что при работе на этом участке момент двигателя почему-либо уменьшится (например, при понижении напряжения сети), то скольжение начнет увеличиваться, что, в свою очередь, вызовет уменьшение вращающего момента, который будет оставаться всегда меньше тормозного, т. е. равновесие не восстановится, и практически ротор двигателя мгновенно остановится (точка П).
Вращающий момент прямо пропорционален квадрату подводимого к обмотке статора напряжения, так как магнитный поток и ток в роторе пропорциональны напряжению. Поэтому изменение напряжения сети вызывает значительное изменение вращающего момента.
В относительных единицах выражение вращающего момента имеет вид:
Механическая характеристика трехфазного асинхронного двигателя играет существенную роль при выборе двигателя. С ее помощью определяют, может ли двигатель сохранять примерно неизменной частоту вращения при изменении нагрузки, что требуется, например, для станков, или, наоборот, может ли он быстро изменять частоту вращения при изменении нагрузки, что требуется, например, для прессов.
Все сказанное о характерных точках, изображенных на рис. 3.2, справедливо и для механической характеристики двигателя. При очень сильном понижении напряжения может случиться, что максимальный вращающий момент (критический момент), который развивает двигатель при данном напряжении, окажется меньше, чем момент сопротивления на его валу. В этом случае происходит опрокидывание двигателя, т. е., как это было описано выше, он остановится. По его обмоткам в этом режиме проходит большой ток, и его необходимо обязательно отключить от сети.
Большое значение имеют механические характеристики асинхронных двигателей, получаемые при включении резисторов в цепи обмоток ротора, что может быть выполнено в двигателях с фазным ротором. На рис. 3.3 видно, что при одной и той же частоте вращения, т. е. при заданном скольжении, момент тем меньше, чем больше сопротивление в цепи ротора.
Значение критической частоты вращения при большом сопротивлении в цепи ротора оказывается меньшим (т. е. значение критического скольжения возрастает). Физически это объясняется тем, что при большом активном сопротивлении в цепи ротора индуктивное сопротивление рассеяния в роторе может стать равным ему только при большом скольжении. Значение максимального вращающего момента, развиваемого двигателем, остается одинаковым при любом сопротивлении в цепи ротора.

Рис. 3.3. Механические характеристики трехфазного асинхронного двигателя при различных сопротивлениях в цепи ротора: 1 — естественная характеристика (без дополнительного сопротивления в цепи ротора); 2—4 — характеристики с возрастающим сопротивлением в цепи ротора
Рабочие характеристики асинхронного двигателя, показанные на рис. 3.4, снимают при номинальных значениях напряжения и частоты тока, т. е. двигатель нерегулируемый, и изменяется только нагрузка на валу.
Зависимость п=/(Р2) у асинхронных двигателей имеет небольшой наклон к оси абсцисс. Соответственно зависимость 5= ДР2) имеет небольшой подъем при возрастании нагрузки. Это

Рис. 3.4. Рабочие характеристики трехфазного асинхронного двигателя: п — частота вращения ротора; S — скольжение; М — момент, развиваемый двигателем; 1 — ток статора; cos ф — коэффициент мощности; ц — КПД двигателя; Р2 — полезная (паспортная) мощность электродвигателя
объясняется тем, что трехфазные асинхронные двигатели работают с небольшим скольжением, которое обычно при номинальной нагрузке не превышает 2—8 %. При холостом ходе двигателя скольжение очень мало s* 0 и л «л,. Частота вращения ротора и его скольжение находятся в следующем соотношении:
Зависимость М=f(P2) имеет вид:
где со = ——угловая частота вращения ротора.
Характеристика несколько отклоняется от прямой линии, так как с ростом нагрузки на валу двигателя вращающий момент увеличивается несколько быстрее, чем полезная мощность, за счет некоторого уменьшения частоты вращения ротора (см. рис. 3.4).
Зависимость /, = f(P2) представляет собой линию, не выходящую из начала осей координат, так как двигатель в режиме холостого хода потребляет из сети ток холостого хода, который, например, для двигателей малой мощности может достигать 50 % и более номинального тока статора. Ток статора, потребляемый двигателем из сети, увеличивается с повышением мощности неравномерно, так как при малых нагрузках на валу двигателя активная составляющая тока статора меньше реактивной составляющей, и на потребляемый статором ток она влияет незначительно. При этих нагрузках ток статора, потребляемый из сети, определяется, в основном, реактивной составляющей. При больших нагрузках активная составляющая тока статора становится больше реактивной, и дальнейшее увеличение нагрузки (а следовательно, и мощности двигателя) ведет к значительному увеличению тока статора.
Зависимость cos ф=/(/ ? 2) показывает, что при переходе двигателя от режима холостого хода к номинальному коэффициент мощности изменяется в значительном диапазоне.
При холостом ходе cos ф мал (около 0,1—0,2), так как активная мощность расходуется только на относительно небольшие потери в статоре и небольшие механические потери, а реактивная мощность имеет постоянное значение, поскольку магнитный поток постоянный. С возрастанием нагрузки (в пределах до номинальной) активная мощность увеличивается, а реактивная остается постоянной, в результате чего cos э
где Р = л/ЗІ/,/, со5ф — мощность двигателя, потребляемая из
сети, Вт; Р2 — полезная (паспортная) мощность двигателя, Вт; АРм, АРШХ — соответственно магнитные и механические (постоянные) потери мощности, Вт; АРЭ — электрические (переменные) потери мощности (в обмотках статора и ротора), Вт.
Наибольшего значения КПД достигает при такой нагрузке, когда потери мощности в стали и механические потери, не зависящие от нагрузки, равны потерям мощности в обмотках статора и ротора, зависящим от нагрузки. Обычно КПД асинхронного двигателя составляет 0,75—0,95. Большее значение КПД имеют двигатели большей мощности.
Однофазные асинхронные двигатели питаются от сети однофазного тока, но обмотка статора может быть при этом однофазной, двухфазной и даже трехфазной. Отличительной особенностью однофазных двигателей от трехфазных является создание статором не вращающегося, а пульсирующего поля и пульсирующей магнитодвижущей силы. Это пульсирующее магнитное поле может быть условно разложено на два поля, вращающиеся в противоположные стороны с одинаковой скоростью. Амплитуда каждого из этих полей равна половине амплитуды пульсирующего поля.
Если рассматривать вращающиеся магнитные поля независимо, то можно установить, что одно поле, взаимодействуя с ротором, создает вращающий момент одного направления М , а другое поле — момент обратного направления М0бр. Тогда результирующий вращающий момент, действующий на ротор однофазного асинхронного двигателя равен:
Механическую характеристику однофазного двигателя можно определить графически — сложить характеристики, указанные на рис. 3.5. На механической характеристике однофазного двигателя видно, что пусковой момент равен нулю.

Рис. 3.5. Механическая характеристика однофазного асинхронного двигателя: Мір — прямой вращающий момент; Л/обр — обратный вращающий момент; п —
Для того чтобы однофазный двигатель пустить в ход, необходимо, чтобы обмотка статора создавала вращающееся магнитное поле, которое можно получить, если на статоре двигателя, помимо основной (рабочей) обмотки, расположить вспомогательную (пусковую) обмотку.
О способах пуска в ход однофазного двигателя и работе трехфазного двигателя в однофазной сети будет сказано ниже.






